कॉन्टॅक्टर कंट्रोल आणि मोटर प्रोटेक्शन सर्किट्स
 करायच्या फंक्शनवर अवलंबून, भिन्न कॉन्टॅक्टर मोटर कंट्रोल सर्किट्स आहेत.
करायच्या फंक्शनवर अवलंबून, भिन्न कॉन्टॅक्टर मोटर कंट्रोल सर्किट्स आहेत.
आकृती 1a एका अपरिवर्तनीय चुंबकीय स्टार्टरची एकत्रित योजना दर्शविते... त्यामध्ये, घटकांची मांडणी निसर्गातील व्यवस्थेशी जुळते, म्हणजेच स्टार्टर बॉक्समध्ये असलेले सर्व घटक आकृतीच्या डाव्या बाजूला गटबद्ध केले जातात आणि "स्टार्ट" आणि "स्टॉप" बटणांसह पुश बटण स्टेशन आकृतीच्या उजव्या बाजूला दर्शविले आहे.
बटण स्टेशन सहसा पासून काही अंतरावर स्थित आहे चुंबकीय स्टार्टर… मोटर कंट्रोल सर्किटच्या ऑपरेशनचे तत्त्व समजून घेण्यासाठी, तपशीलवार (मूलभूत) आकृत्या सहसा वापरल्या जातात (चित्र 1.b). SB2 स्टार्ट बटण दाबून, KM कॉन्टॅक्टर कॉइल सर्किट बंद होते, ज्यामध्ये मोटर सप्लाय सर्किटचे तीन KM संपर्क समाविष्ट असतात. या प्रकरणात, प्रारंभ बटण SB2 सह समांतर कनेक्ट केलेला ब्लॉक संपर्क KM देखील बंद होतो. जेव्हा SB2 बटण सोडले जाते तेव्हा हे तुम्हाला KM कॉइलला ऊर्जा देण्यास अनुमती देते.
कॉइल बंद असताना SB1 बटण दाबून मोटर थांबते आणि पॉवर (मुख्य) संपर्क आणि सहायक संपर्क सोडते. जेव्हा SB1 बटण सोडले जाईल, तेव्हा कॉइल KM चे सर्किट डी-एनर्जाइज केले जाईल. इंजिन रीस्टार्ट करण्यासाठी, पुन्हा SB2 बटण दाबा.
हे सर्किट तथाकथित शून्य संरक्षण देखील प्रदान करते, म्हणजेच, जर मुख्य व्होल्टेज गायब झाले किंवा नाममात्राच्या 50-60% पर्यंत खाली आले तर, KM कॉइल KM पॉवर संपर्क ठेवणार नाही आणि मोटर बंद केली जाईल. जेव्हा व्होल्टेज दिसून येते किंवा नाममात्र मूल्याच्या जवळ असलेल्या मूल्यापर्यंत वाढते, तेव्हा चुंबकीय स्टार्टर उत्स्फूर्तपणे व्यस्त होणार नाही. ते चालू करण्यासाठी, तुम्हाला पुन्हा स्टार्ट बटण दाबावे लागेल.
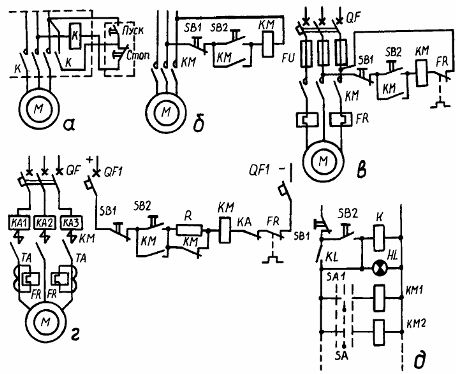
तांदूळ. 1. मोटर नियंत्रण आणि संरक्षण योजना: a — एकत्रित आणि b — अपरिवर्तनीय चुंबकीय स्टार्टरची तपशीलवार योजना; c - फ्यूज आणि थर्मल रिलेद्वारे इंजिन संरक्षण; डी - शक्तिशाली इंजिन कंट्रोल स्टेशनचे आकृती; डी - इंटरमीडिएट रिलेपासून शून्य संरक्षण
विंडिंगच्या ओव्हरहाटिंगपासून मोटरचे संरक्षण दीर्घकाळापर्यंत ओव्हरलोड्स दरम्यान केले जाते थर्मल रिले एफआर, आणि मोठ्या ओव्हरलोड्स किंवा शॉर्ट सर्किट्सपासून संरक्षण फ्यूज एफयू किंवा द्वारे प्रदान केले जाते सर्किट ब्रेकर QF (Fig. 1, c). दीर्घकाळापर्यंत ओव्हरलोड्सपासून संरक्षण करण्यासाठी, दोन थर्मल रिले वापरल्या जातात, कारण एका रिलेसह, उडालेला फ्यूज झाल्यास, या रिलेचा हीटिंग घटक ज्या मालिकेत जोडलेला आहे, मोटर सिंगल-फेज नेटवर्कशी जोडली जाईल आणि त्यांना संरक्षण दिले जाणार नाही. या रिलेचे ब्रेकिंग संपर्क स्टार्टर कॉइलसह मालिकेत जोडलेले आहेत. जेव्हा त्यापैकी एक उघडते, तेव्हा KM कॉइल डी-एनर्जाइज होते आणि मोटर थांबते, जसे की SB1 बटण दाबले जाते.
अंजीर मध्ये उच्च पॉवर मोटर कंट्रोल स्टेशन दाखवले आहे. 1, d. ओव्हरलोड रिले KA1 — KA3 द्वारे शॉर्ट-सर्किट संरक्षण प्रदान केले जाते, वर्तमान ट्रान्सफॉर्मरद्वारे जोडलेल्या थर्मल रिले FR द्वारे ओव्हरलोड संरक्षण प्रदान केले जाते. थ्री-पोल कॉन्टॅक्टरची कॉइल थेट करंटसह पुरवली जाते. सर्किटमध्ये समाविष्ट केल्यानंतर कॉन्टॅक्टर कॉइलमधील विद्युतप्रवाह कमी करण्यासाठी, अतिरिक्त प्रतिरोधक आर सादर केला जातो, जो पूर्वी ओपन कॉन्टॅक्ट KM द्वारे शॉर्ट केला होता.
एकाधिक नियंत्रक, स्विचेस किंवा इतर उपकरणांसह मॅन्युअल कंट्रोल सर्किट्समध्ये, तटस्थ संरक्षण प्रदान करण्यासाठी इंटरमीडिएट रिलेचा वापर केला जातो. (Fig. 1, e). कंट्रोल सर्किटमध्ये व्होल्टेज लागू करण्यासाठी, SB2 बटण दाबा, त्याद्वारे इंटरमीडिएट रिले K चालू करा, ज्यामध्ये त्याचा बंद होणारा संपर्क K आणि सिग्नल दिवा HL समाविष्ट आहे, जे कंट्रोल सर्किटमध्ये व्होल्टेजची उपस्थिती दर्शवते. . SB2 बटण सोडल्यानंतर, SM1 कंट्रोलरचे सर्किट, SM पॅकेट स्विच इ. असताना रिले कॉइल ब्लॉक केले जाईल. आणि KM1, KM2 इत्यादी कॉन्टॅक्टर्सच्या कॉइल्स उर्जावान होतील.
विचारात घेतलेल्या योजनांमध्ये, मोटर्सच्या सतत ऑपरेशनसाठी स्व-लॉकिंग संपर्क आवश्यक आहेत. बर्याचदा प्रॅक्टिसमध्ये स्टार्ट बटण दाबल्यावरच इंजिन चालवावे लागते, उदाहरणार्थ लिफ्टिंग मशीनमध्ये. या प्रकरणात, कंट्रोल सर्किटमध्ये कोणतेही स्टॉप बटण नाही (चित्र 2, अ). कधीकधी दोन मोडमध्ये ड्राइव्हचे ऑपरेशन सुनिश्चित करणे आवश्यक असते, म्हणजे, मशीन सेट करताना थोड्या काळासाठी किंवा दीर्घ कालावधीसाठी ते चालू करणे. नंतर, SB2 (Fig. 2.b) बटणाच्या छोट्या दाबाने, कॉन्टॅक्टर KM ची कॉइल चालू होईल आणि KM चा सेल्फ-लॉकिंग कॉन्टॅक्ट बंद होईल, तर SB2 बटण सोडल्यावर मोटर चालू होईल. .
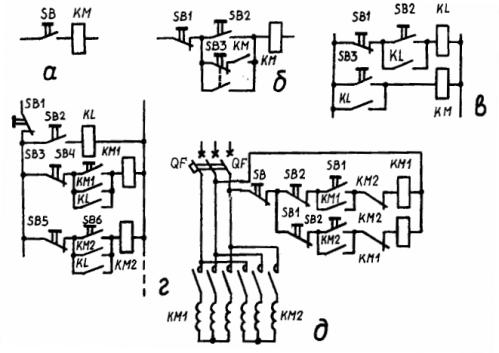
तांदूळ. 2. एसिंक्रोनस मोटर्ससाठी कंट्रोल सर्किट्सचे प्रकार: a — जॉगिंग मोडमध्ये; b आणि c - दीर्घकाळ काम आणि जॉगिंग दरम्यान; d - अनेक इंजिनांचा एकाचवेळी समावेश; d — दोन-स्पीड मोटरची स्टेपलेस स्टार्ट
मोटर कंट्रोल मोडसाठी, SB3 बटण दाबा, त्याचा बंद होणारा संपर्क कॉन्टॅक्टर केएमची कॉइल चालू करतो आणि उघडणारा संपर्क कॉन्टॅक्टरचे सेल्फ-लॉकिंग सर्किट तोडतो. या सर्किटचा तोटा असा आहे की SB3 बटणाचा खुला संपर्क KM ब्लॉकचा संपर्क उघडण्यापूर्वी बंद होऊ शकतो आणि मोटर बंद होत नाही. अंजीर मध्ये दर्शविलेले सर्किट. 2, च, हा दोष नसलेला आहे.
सतत ऑपरेशनसाठी, SB2 बटण दाबल्याने इंटरमीडिएट रिले K चालू होते. कॉन्टॅक्ट्सपैकी एक KM कॉन्टॅक्टरची कॉइल चालू करतो आणि दुसरा SB2 बटण एकाच वेळी ब्लॉक करतो, ज्यामुळे स्टार्ट बटणासह इंजिनचे ऑपरेशन बंद होते. सोडले. ऑपरेशन सुरू करण्यासाठी, SB3 बटण दाबा आणि आवश्यक वेळेसाठी धरून ठेवा.
आकृती 2d इंटरमीडिएट रिले वापरून एका स्टार्ट बटणापासून एकाच वेळी अनेक मोटर्स सुरू करण्याची योजना दर्शविते ... बटण SB2 रिले K चालू करते, ज्याचे बंद होणारे संपर्क एकाच वेळी KM1, KM2, इत्यादी कॉन्टॅक्टर्सचे कॉइल चालू करतात. SB1 बटणासह सर्व मोटर्स एकाच वेळी थांबवा. प्रत्येक मोटर स्वतंत्रपणे चालू आणि बंद करण्यासाठी, अनुक्रमे SB3, SB4 आणि SB5, SB6, इत्यादी बटणे वापरा.
दोन-स्पीड टू-वाइंडिंग गिलहरी-पिंजरा रोटर मोटरचा स्टेपलेस प्रारंभ आकृती अंजीर मध्ये दर्शविला आहे. 2, ई. पहिल्या वेगाने इंजिन सुरू करण्यासाठी, SB1 बटण वापरले जाते, दुसऱ्यावर - SB2.इंजिनला एकाच वेळी दोन वेगात गुंतण्यापासून रोखण्यासाठी दोन्ही बटणे यांत्रिकरित्या एकमेकांशी जोडलेली असतात.
स्टार्टर सर्किट देखील विद्युत अवरोधित आहेत. म्हणून, जेव्हा, उदाहरणार्थ, कॉइल KM1 कार्यान्वित होते, तेव्हा उघडणारा संपर्क कॉइल KM2 चे सर्किट तोडतो, त्याच्या समावेशाची शक्यता वगळून. दुसऱ्या गतीवर स्विच करण्यासाठी, तुम्हाला SB2 बटण दाबावे लागेल, तर कॉइल KM1 चे सर्किट तुटलेले आहे आणि ते बंद होते. KM2 सर्किटची कॉइल पॉवर प्राप्त करते आणि दुसऱ्या वेगाने मोटर चालू करते.
असिंक्रोनस मोटर्सचे उलट नियंत्रण दोन कॉन्टॅक्टर्स (चित्र 3, अ) वापरून केले जाते.
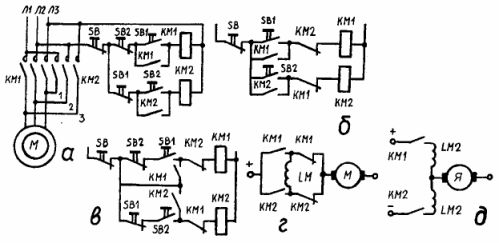
अंजीर. 3. इंजिन नियंत्रण योजना: a — यांत्रिक ब्लॉकिंगसह उलट करता येणारे चुंबकीय स्टार्टर; b — इलेक्ट्रिकल ब्लॉकिंगसह समान; c — पर्याय a आणि b चे संयोजन; d आणि e — कमी पॉवरच्या DC मोटर्स सुरू करणे आणि उलट करणे
कंटॅक्टर KM1 मोटरला पुढे जाण्यासाठी वापरला जातो आणि KM2 रिव्हर्समध्ये वापरला जातो. दोन कॉन्टॅक्टर्सचे अपघाती एकाच वेळी चालू होण्यापासून रोखण्यासाठी, ज्यामुळे शॉर्ट सर्किट होते, सर्किट SB1 आणि SB2 बटणाच्या दोन व्यत्यय आणणार्या संपर्कांसह म्युच्युअल मेकॅनिकल ब्लॉकिंग (चित्र 3, a पहा) वापरते. SB1 बटण दाबून, चालू करा. कॉइल KM1 चे सर्किट आणि कॉइल सर्किट KM2 डिस्कनेक्ट करा.
जेव्हा SB1 आणि SB2 बटणे एकाच वेळी दाबली जातात, तेव्हा KM1 आणि KM2 कॉइल्सचे सर्किट तुटतात आणि कोणतेही संपर्कक चालू होणार नाहीत. ब्लॉकिंग दोन व्यत्यय आणणारे संपर्क KM2 आणि KM1 द्वारे चालते, अनुक्रमे KM1 आणि KM2 कॉइल्सच्या सर्किटमध्ये समाविष्ट आहेत (चित्र 3, b). या योजनेतील इंजिन उलट करण्यासाठी, तुम्ही प्रथम SB बटण दाबावे.
अंजीर मध्ये सर्किट. 3, c हे दोन मागील सर्किट्सचे संयोजन आहे, म्हणजेच दुहेरी ब्लॉकिंग आहे.एसबीआय बटण कॉन्टॅक्टर केएम 1 चालू करते आणि कॉन्टॅक्टर केएम 2 च्या कॉइलचे सर्किट SB1 बटण आणि ब्लॉक केएम 1 च्या संपर्काच्या एकाच वेळी उघडलेल्या संपर्कामुळे खंडित होते.
आकृती 3, d आणि e कमी-पॉवर अनुक्रमे उत्तेजित मोटर्स सुरू करण्यासाठी आणि उलट करण्यासाठी सर्वात सोप्या योजना दर्शविते... अशा मोटर्स रियोस्टॅट्स सुरू न करता नेटवर्कशी जोडल्या जातात. अंजीर मध्ये आकृती नुसार. 3, d, मालिका उत्तेजनासह मोटरची सुरूवात आणि उलट करणे दोन इंटरमीडिएट रिलेद्वारे केले जाते. एलएम फील्ड कॉइलमधील विद्युत् प्रवाहाची दिशा उलट करून मोटर उलट केली जाते. दोन मालिका फील्ड विंडिंग्स असलेल्या मोटर्समध्ये विरुद्ध दिशेने चुंबकीय प्रवाह निर्माण होतात, स्विचिंग आणि रिव्हर्सिंग सर्किटमध्ये फक्त दोन संपर्क संपर्क असतात (चित्र 3, ई पहा).
विचारात घेतलेल्या नियंत्रण योजनांमधून पाहिल्याप्रमाणे, गिलहरी-पिंजरा रोटर एसिंक्रोनस मोटर्स सुरू करणे आणि उलट करण्याची प्रक्रिया स्वयंचलित करणे सर्वात सोपे आहे. या प्रकरणात, प्रारंभ करताना सर्व नियंत्रण मोटरला पॉवर नेटवर्कशी जोडण्यासाठी आणि थांबवताना - नेटवर्कवरून डिस्कनेक्ट करण्यासाठी कमी केले जाते.
रोटरच्या फेज वाइंडिंगसह इंडक्शन मोटर्स सुरू करणे, थांबवणे आणि थांबवणे हे अधिक जटिल आहे, वाढीव शक्तीच्या इंडक्शन गिलहरी-पिंजरा मोटर्स, मध्यम आणि उच्च पॉवरच्या डीसी मोटर्स, स्टेप स्टार्टसह मल्टी-स्पीड इंडक्शन मोटर्स, तसेच सिंक्रोनस मोटर्स म्हणून. ही इंजिने नियंत्रित आहेत वेळेचे कार्य म्हणून, गती आणि वर्तमान.
वरील प्रकरणांव्यतिरिक्त, इंजिन नियंत्रण केले जाऊ शकते आणि मार्ग तत्त्वानुसार, जेव्हा कार्यरत शरीर अंतराळात एका विशिष्ट स्थितीत पोहोचते तेव्हा इंजिन सुरू होते आणि मंद होते.अशी कार्ये करणार्या प्रणालींना ओपन-लूप सिस्टीम म्हणतात कारण त्यांच्याकडे आउटपुट मूल्य आणि इनपुट मूल्य यांच्यामध्ये कोणताही अभिप्राय नसतो.