एकाधिक ठिकाणांवरील इलेक्ट्रिक ड्राइव्ह नियंत्रण योजना
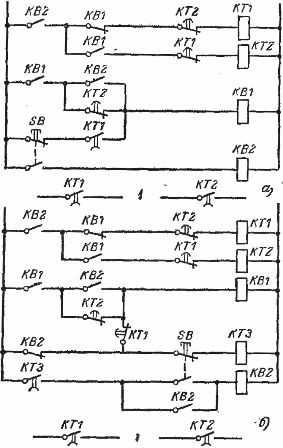
 सतत प्रक्रियेच्या ओळींसाठी, जिथे ड्राइव्ह प्रामुख्याने एका दिशेने (फॉरवर्ड) कार्य करतात आणि रिव्हर्सल्स दुर्मिळ असतात, ब्रेकरद्वारे "फॉरवर्ड" ऑपरेशनसाठी लाइन कॉन्टॅक्टरच्या समावेशासह सर्किट (चित्र 1) वापरण्याची शिफारस केली जाते, आणि "रिव्हर्स" ऑपरेशनसाठी — KMR कॉन्टॅक्टरच्या संपर्कांद्वारे. ही व्यवस्था पसंतीच्या दिशेने ड्राइव्ह सुरू करण्यासाठी वेळ कमी करते.
सतत प्रक्रियेच्या ओळींसाठी, जिथे ड्राइव्ह प्रामुख्याने एका दिशेने (फॉरवर्ड) कार्य करतात आणि रिव्हर्सल्स दुर्मिळ असतात, ब्रेकरद्वारे "फॉरवर्ड" ऑपरेशनसाठी लाइन कॉन्टॅक्टरच्या समावेशासह सर्किट (चित्र 1) वापरण्याची शिफारस केली जाते, आणि "रिव्हर्स" ऑपरेशनसाठी — KMR कॉन्टॅक्टरच्या संपर्कांद्वारे. ही व्यवस्था पसंतीच्या दिशेने ड्राइव्ह सुरू करण्यासाठी वेळ कमी करते.
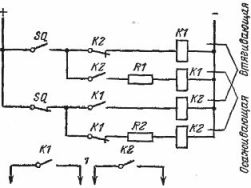
अंजीर मध्ये आकृती. 2 हलत्या वस्तूवरून इलेक्ट्रिक मोटरच्या रिमोट रिव्हर्सिबल कंट्रोलला अनुमती देते. हे सर्किट वापरले जाते, उदाहरणार्थ, क्रेनमधून हीटिंग वेल कव्हर्सच्या मोटर्स नियंत्रित करण्यासाठी. सिग्नल सर्किट्स आणि विविध सिग्नलचे रिसेप्शन अंजीर मध्ये दर्शविले आहेत. ३ - ९.
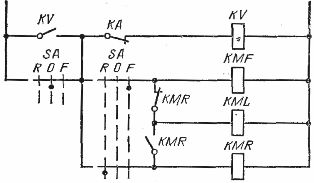
तांदूळ. 1. दुर्मिळ मागील «मागील» सह मागील इंजिन नियंत्रण योजना.
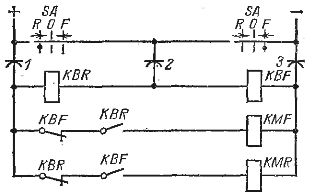
तांदूळ. 2. कंट्रोल ट्रोलद्वारे मोटरच्या उलट करण्यायोग्य नियंत्रणाची योजना.
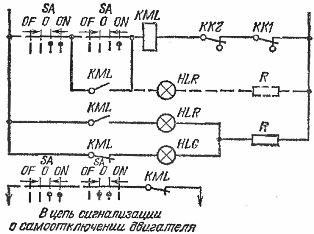
तांदूळ. 3. अपरिवर्तनीय इलेक्ट्रिक ड्राइव्हची स्थिती सिग्नल करण्यासाठी योजना.
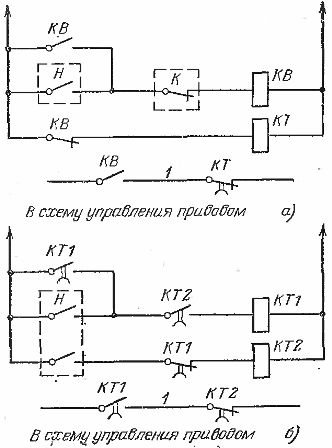
तांदूळ. 4.दीर्घ (a) आणि स्पंदित (b) सिग्नलच्या प्रदर्शनास प्रारंभ झाल्यानंतर वेळेच्या विलंबासह सिग्नल प्राप्त करण्यासाठी सर्किट्स: K — अनलॉकिंग संपर्क, 1 — ड्राइव्हच्या कंट्रोल सर्किटशी संपर्क.
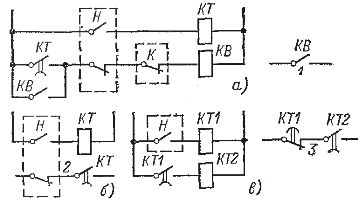
तांदूळ. 5. सिग्नल H लाँग (a), पल्स (b), वेळेच्या विलंबासह (c) च्या बीटच्या समाप्तीनंतर (शेपटीपासून) सिग्नल प्राप्त करण्याच्या योजना. K — अनलॉकिंग संपर्क, 1, 2, 3 — ड्राइव्ह कंट्रोल सर्किटचे संपर्क.
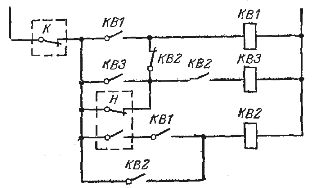
तांदूळ. 6. माध्यमिक एचच्या सुरुवातीनंतर एक लांब सिग्नल प्राप्त करण्यासाठी योजना.
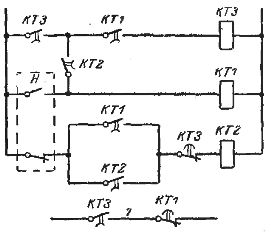
तांदूळ. 7. सिग्नल H (KT1 0.2-0.8 s; KT2 0.3 s; KTZ 0.5 s) च्या दुय्यम क्रियेनंतर वेळेच्या विलंबासह पल्स सिग्नल प्राप्त करण्याची योजना. 1 - ड्राइव्ह कंट्रोल सर्किटशी संपर्क.
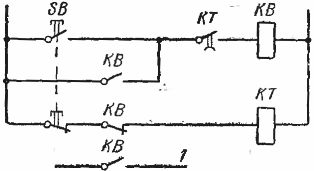
तांदूळ. 8. बटण दाबण्याच्या कालावधीची पर्वा न करता ठराविक कालावधीचे सिग्नल प्राप्त करण्याची योजना: 1 — ड्राइव्ह कंट्रोल सर्किटशी संपर्क.
ठराविक ऑपरेशन्स किंवा सायकल्स मोजल्यानंतर ड्राइव्हवर आपोआप परिणाम करण्यासाठी मोजणी योजना वापरल्या जातात. ते बंद आणि उघडणे (चित्र 10), फक्त बंद (चित्र 11), किंवा फक्त उघडणे (चित्र 12) मोजू शकतात.
सूचित योजनांनुसार डाळी मोजणे फोटो रिले संपर्क, मोशन स्विच किंवा इतर डिव्हाइसेसवरून पुरवले जाते.
अंजीर मध्ये दर्शविलेल्या मोजणी योजनेत. 10, REV850 रिलेचा वापर आर्मेचरच्या चुंबकीय "स्टिकिंग" सह केला जातो आणि म्हणून या सर्किटला व्होल्टेज पुरवठ्यामध्ये व्यत्यय आल्याने मोजणीमध्ये व्यत्यय येत नाही. इतर मोजणी सर्किट्समध्ये, जेव्हा व्होल्टेज पुरवठ्यात व्यत्यय येतो तेव्हा नाडी मोजण्याचे नुकसान होते.
खाते योजनेची वैधता तपासण्यासाठी (चित्र 11), नियंत्रण बटणे… प्रत्येक वेळी तुम्ही SB0N बटण दाबता, सर्किट एक गणना करते. काउंटर रीसेट करण्यासाठी SB0F बटण वापरले जाते.अशी बटणे इतर योजनांमध्ये देखील दिली जाऊ शकतात.
तांदूळ. 9. दोन वेगवेगळ्या सर्किट्समध्ये सलग एक बटण दाबून सिग्नल प्राप्त करण्यासाठी सर्किट्स: a — सिग्नलचा कालावधी बटण दाबण्याच्या कालावधीइतका असतो, b — सिग्नलचा कालावधी बटण दाबण्याच्या कालावधीवर अवलंबून नाही. , 1 — ड्राइव्ह कंट्रोल सर्किटशी संपर्क.
तांदूळ. 10. दोन पर्यंत खात्याची योजना.
प्रत्येक क्रमांकासाठी डाळी मर्यादा स्विच SQ च्या संपर्काचे एक बंद आणि एक उघडणे आहेत; 1 - ड्राइव्ह कंट्रोल सर्किटशी संपर्क.
अंजीर च्या सर्किट मध्ये डाळी मोजणे. 11, 12 हे SQ संपर्काचे अल्प-मुदतीचे बंद (उघडणे) आहेत आणि या संपर्काची बंद स्थिती आवेग संपर्ककर्ता KNA आणि एक रिले KB (KL) चालू करण्यासाठी पुरेशी असावी.
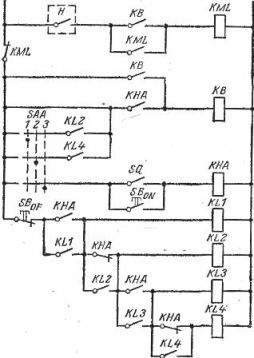
तांदूळ. 11. संपर्क SQ बंद असताना तीनपर्यंत मोजण्याची योजना.
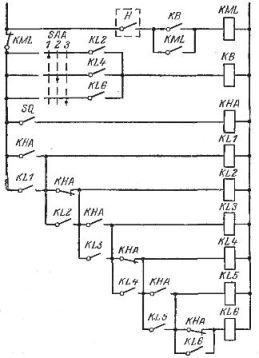
तांदूळ. 12. SQ संपर्क उघडताना तीन पर्यंत मोजण्याची योजना
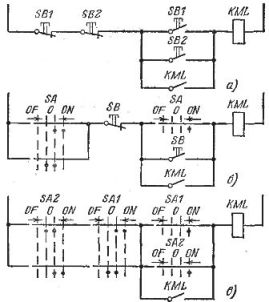
तांदूळ 13. दोन ठिकाणांहून इंजिनच्या अपरिवर्तनीय नियंत्रणाच्या योजना: a — दोन बटणांसह, b — एक बटण आणि एक की सह, c — दोन की सह.
तांदूळ. 14. दोन ठिकाणांहून इलेक्ट्रिक ड्राइव्हच्या एकतर्फी अवलंबित उलट करण्यायोग्य नियंत्रणाची योजना.
KML लाइन संपर्ककर्त्याद्वारे गणना रीसेट केली जाते; SQ संपर्ककर्त्याची बंद वेळ KML संपर्ककर्त्याच्या वेळेपेक्षा कमी असणे आवश्यक आहे.
थोड्या मोठ्या संख्येसाठी मोजणी योजना वरील योजनांच्या सादृश्याने तयार केल्या जाऊ शकतात, परंतु जेव्हा गणना पाच किंवा आठ पेक्षा जास्त असेल किंवा व्होल्टेज गायब झाल्यावर मोजणीचे नुकसान अस्वीकार्य असेल अशा प्रकरणांमध्ये क्रमांकित वापरण्याची शिफारस केली जाते. रिले
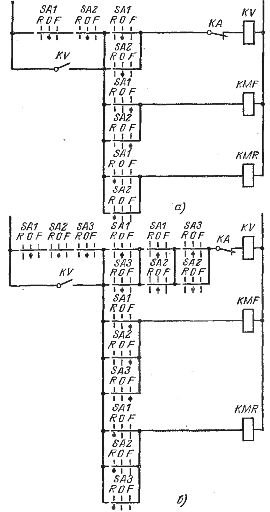
तांदूळ. 15. अवलंबित उलट करण्यायोग्य इंजिन नियंत्रणाच्या योजना: a — दोन ठिकाणांहून, b — तीन ठिकाणांहून
E-526 मोटर स्टेप काउंट रिले 30 काउंट्सपर्यंत किंवा 75 पल्स काउंटसह टाइप E 531 पल्स काउंट रिले वापरले जाऊ शकतात. रिले पर्यायी प्रवाहावर कार्य करतात आणि त्यांचे संपर्क अनुक्रमे 220 V वर पॉवर-ऑफ सक्षम करतात. आणि डीसी 50 आणि 30 वॅट्स.
अनेक ठिकाणांवरील इलेक्ट्रिक मोटर्सचे कंट्रोल सर्किट्स अवलंबून, दिशाहीन आणि स्वतंत्र असू शकतात (चित्र 13). बर्याचदा, आश्रित नियंत्रण योजना वापरल्या जातात (Fig. 15) सर्वात सोपी म्हणून. या योजनांनुसार, कोणतेही नियंत्रण यंत्र चालवताना, दुसर्या उपकरणाचे हँडल शून्यातून ऑपरेटिंग पोझिशनवर हलवल्याने मोटर थांबते.
दोन (Fig. 14) आणि तीन (Fig. 16) ठिकाणांवरील एक-मार्ग अवलंबित नियंत्रणाच्या योजनांनुसार, स्विच SA1 हे स्विच SA2 (SA2 आणि SA3) च्या स्थितीपासून स्वतंत्रपणे नियंत्रित केले जाऊ शकते. जेव्हा SA1 स्विच शून्य स्थितीत असेल आणि SA3 स्विचच्या स्थितीवर अवलंबून नसेल तेव्हा SA2 स्विचचे नियंत्रण शक्य आहे. SA1 आणि SA2 स्विच शून्य स्थितीत असताना SA3 स्विचचे नियंत्रण शक्य आहे.
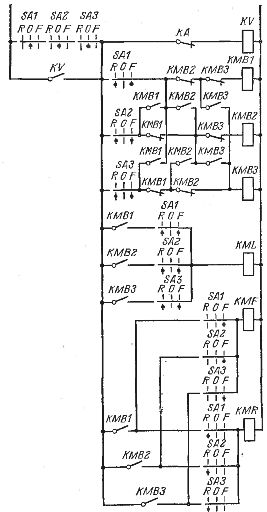
आकृती 16. तीन-स्थानांच्या परस्परसंबंधित मोटरच्या दिशाहीन अवलंबित नियंत्रणाचे योजनाबद्ध
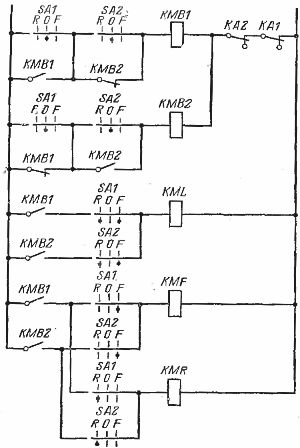
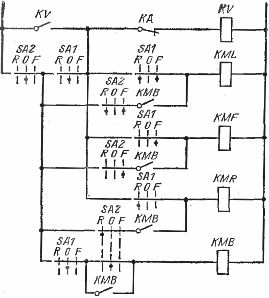
तांदूळ. 17. दोन ठिकाणांहून इंजिनच्या स्वतंत्र उलट करण्यायोग्य नियंत्रणाची योजना.
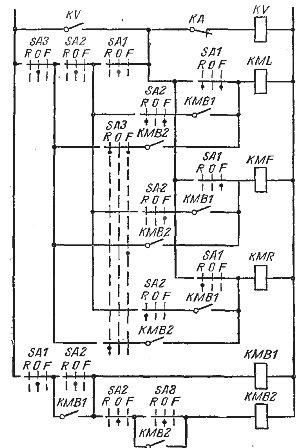
तांदूळ. 18. तीन ठिकाणांहून इंजिनच्या स्वतंत्र उलट करण्यायोग्य नियंत्रणाची योजना.
स्वतंत्र नियंत्रण योजनांमध्ये (अंजीर 17 आणि 18), जेव्हा ड्राइव्ह कोणत्याही पहिल्या स्विचद्वारे नियंत्रित केले जाते (SA1, SA2 किंवा SA3), इतर स्विचचे हँडल हलवल्याने ड्राइव्हच्या ऑपरेशनवर परिणाम होत नाही. पहिल्या कीच्या हँडलच्या शून्य स्थितीवर परत आल्यानंतर, अॅक्ट्युएटर दुसऱ्या की (किंवा इतर दोन) च्या हँडलच्या स्थितीकडे दुर्लक्ष करून थांबेल. दुसरी की (किंवा इतर दोन) शून्य स्थितीत परत केल्यावरच नवीन प्रारंभ शक्य आहे.
बर्याचदा ते सरलीकृत योजनेनुसार दोन आणि तीन ठिकाणांहून ड्राइव्ह नियंत्रण वापरतात (चित्र 19); याचा अर्थ फक्त एका प्रथम स्थानावरून प्राधान्य नियंत्रण (की SA1). जेव्हा ड्राइव्ह दुसर्या स्विच (SA2 किंवा SA3) द्वारे नियंत्रित केले जाते, तेव्हा पहिल्या स्विचचे हँडल शून्य स्थानावरून हलवल्याने नियंत्रण त्या स्विचवर हस्तांतरित केले जाते.
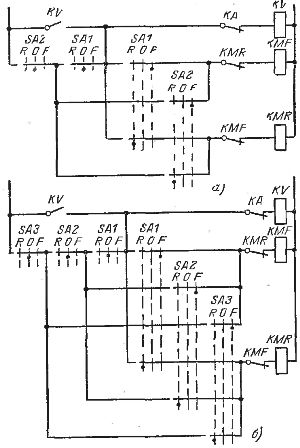
तांदूळ. 19. रिव्हर्सिबल इलेक्ट्रिक ड्राइव्ह नियंत्रित करण्यासाठी सरलीकृत योजना: a — दोन ठिकाणांहून, b — तीन ठिकाणांहून.