यंत्रणेच्या हालचालीचे पिस्टन नियंत्रण
रिले सर्किट्स
 अंजीर मध्ये. 1 SQ कंट्रोलरद्वारे निश्चित केलेल्या स्थिर स्ट्रोक पिस्टन मोशन कंट्रोल स्कीमचे विविध प्रकार दर्शविते.
अंजीर मध्ये. 1 SQ कंट्रोलरद्वारे निश्चित केलेल्या स्थिर स्ट्रोक पिस्टन मोशन कंट्रोल स्कीमचे विविध प्रकार दर्शविते.
अंजीर मध्ये रेखाचित्रे. 1, a-c चा वापर केला जातो जेव्हा सायकलमध्ये एक "फॉरवर्ड" हालचाल B असते आणि एक "मागे" हालचाल H सुरू होते. KQ रिलेने दिलेल्या स्वयंचलित कमांडसह योजना 1, a आणि b वापरल्या जातात. KT रिले रिव्हर्स सुरू करण्यापूर्वी एक विराम देते. अंजीर च्या चित्रात. 1, सायकल स्टार्ट कमांड कंट्रोलर किंवा युनिव्हर्सल स्विच एसएम द्वारे दिली जाते.
अनंत परस्पर गतीची अंमलबजावणी करण्यासाठी, अंजीरमधील आकृती. 1, d. स्ट्रोकची संख्या दिलेल्या मूल्य n द्वारे मर्यादित असणे आवश्यक असल्यास, मोजणी रिलेचा एक खुला संपर्क किंवा अनेक रिलेचे एकक, जे "मागे" संपर्ककर्ता KM2 च्या बंद संपर्काद्वारे पुरवलेल्या डाळींची गणना करते, कॉन्टॅक्टर सर्किटमध्ये समाविष्ट आहे «पुढे» KM1.
चार पोझिशनमध्ये व्हेरिएबल स्ट्रोक लांबीसह परस्पर गतीची अंमलबजावणी करण्याचे उदाहरण अंजीरमध्ये दर्शविले आहे. 2.संपर्क SQ.1- SQ.4- कमांड डिव्हाइस SQ चा वापर "फॉरवर्ड" स्ट्रोकच्या 1-4 पोझिशनमधील यंत्रणा बंद करण्यासाठी, प्रारंभिक स्थितीत SQ.5- शी संपर्क साधा. सर्किट ऑटोमेशन रिले KQ1 द्वारे दिलेल्या पल्स कमांडचा वापर करते, जे बंद आहे, उदाहरणार्थ, वर्कपीस फीड करताना, आणि KQ2, जे प्रत्येक स्ट्रोकच्या शेवटी इंटरमीडिएट ऑपरेशनच्या शेवटी निश्चित करते.
अनुक्रमिक मॅन्युव्हरिंग SQ.1 — SQ कंट्रोलरचे SQ.3 हे रिलेच्या संपर्कांद्वारे KS1, KSZ आणि KS5 या "बॅक" यंत्रणेच्या हालचालींची संख्या मोजण्यासाठी चालते. रिले KS7, चौथ्या हालचाली "मागे" फिक्स करून, रिले KS1-KC6 बंद करते आणि या रिक्त गट (रिले KR) सह तांत्रिक ऑपरेशनच्या शेवटी निळा येईपर्यंत "फॉरवर्ड" चालू करण्यास प्रतिबंधित करते. KC7 कॉइल सर्किटमध्ये केआर रिलेचा प्रारंभिक संपर्क सर्किटला त्याच्या मूळ स्थितीत परत करतो.
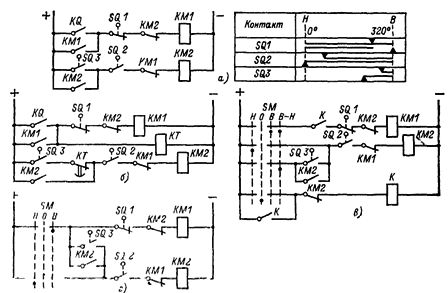
तांदूळ. 1. परस्पर हालचालीसाठी रिले कंट्रोल सर्किट्स
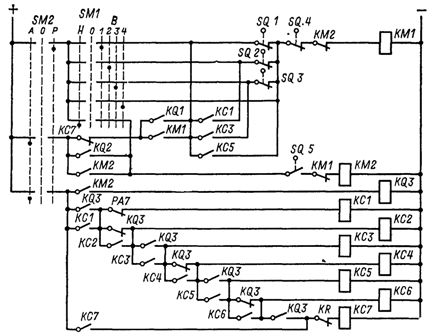
आकृती 2. व्हेरिएबल स्ट्रोक लांबीसह परस्पर रिलेची नियंत्रण योजना
लॉजिक सर्किट
"लॉजिक टी" मालिकेतील घटकांवर बनवलेले पिस्टन मूव्हमेंट कंट्रोल सर्किट अंजीरमध्ये दाखवले आहे. 3. T-201 प्रकारचे D1-D3 घटक इनपुट रिले सिग्नलला तर्क घटकांसह समन्वयित करण्यासाठी वापरले जातात.
D4.1, D4.2 घटकांची मेमरी रिले KQ स्पंदित चालू असताना "पुढे" हलवण्याच्या आदेशाची उपस्थिती निश्चित करते. अॅम्प्लीफायर D5 द्वारे, समोरचा संपर्ककर्ता KM1 चालू आहे. "फॉरवर्ड" यंत्रणेच्या हालचालीच्या शेवटी, जेव्हा नियंत्रक SQ 1 चा संपर्क बंद असतो, तेव्हा संबंधित घटक D2 च्या आउटपुटवर एक सिग्नल 1 दिसून येतो, जो मेमरी D4 आणि संपर्ककर्ता KM1 बंद करतो आणि चालू करतो. D6 घटकांवरील मेमरी. या प्रकरणात, "मागे" हलवण्याची आज्ञा दिली जाते आणि लक्षात ठेवली जाते.हा आदेश काढला जातो आणि जेव्हा कंट्रोलर SQ 2 चा संपर्क प्रारंभिक स्थितीत बंद होतो, तेव्हा संबंधित घटक D3 च्या आउटपुटवर सिग्नल 1 दिसतो तेव्हा, मेमरी D6 अक्षम करून मागास हालचाल थांबविली जाते.
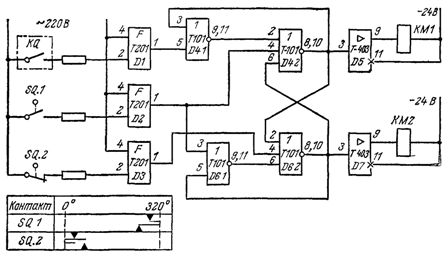
तांदूळ. 3. "लॉजिक टी" मालिकेतील घटकांवर परस्पर हालचाली नियंत्रित करण्यासाठी योजना
मेमरी D4 आणि D6 अवरोधित केल्या आहेत, त्यामुळे त्यापैकी फक्त एक चालू केली जाऊ शकते. मेमरी D4 चालू असताना, घटक D4.2 च्या आउटपुटमधून सिग्नल 1 घटक D6.2 च्या इनपुट 2 ला दिले जाते, मेमरी D6 अक्षम करते आणि त्याउलट. मेमरी D6 चालू असताना, D6 2 घटकाच्या आउटपुटमधून सिग्नल 1 घटक D4.2 च्या इनपुट 6 ला दिले जाते, मेमरी D4 अक्षम करते.