नियंत्रण योजना डिझाइन करण्यासाठी एक अंतर्ज्ञानी पद्धत
 अंतर्ज्ञानी पद्धत - विविध यंत्रणांच्या ऑटोमेशनमध्ये विविध डिझाइन संस्थांमध्ये मिळालेल्या अनुभवावर आधारित नियंत्रण योजना विकसित करण्याची पद्धत. हे डिझायनरच्या अभियांत्रिकी अंतर्ज्ञानावर आधारित आहे.
अंतर्ज्ञानी पद्धत - विविध यंत्रणांच्या ऑटोमेशनमध्ये विविध डिझाइन संस्थांमध्ये मिळालेल्या अनुभवावर आधारित नियंत्रण योजना विकसित करण्याची पद्धत. हे डिझायनरच्या अभियांत्रिकी अंतर्ज्ञानावर आधारित आहे.
केवळ एकच ज्याने मागील सर्व अनुभव आत्मसात केले आहेत आणि योजना तयार करण्याच्या बाबतीत विशिष्ट क्षमता आहे, जो अमूर्तपणे विचार करू शकतो आणि तर्कशुद्धपणे तर्क करू शकतो, तो या पद्धतीमध्ये उत्तम प्रकारे प्रभुत्व मिळवू शकतो. त्याची जटिलता असूनही, बहुतेक इलेक्ट्रिकल डिझाइनर अंतर्ज्ञानी पद्धत मोठ्या प्रमाणावर वापरतात.
उदाहरणार्थ, पुश लीव्हरच्या सरलीकृत किनेमॅटिक आकृतीचा विचार करा (चित्र 1). जेव्हा चाक 5 घड्याळाच्या दिशेने फिरते, तेव्हा लीव्हर 4 लीव्हर 1 ला अक्ष O भोवती फिरवते, ज्यामुळे लीव्हर 2 सह शू 3 चे भाषांतर करण्यास भाग पाडते. चाक 5 च्या पुढील रोटेशनसह, लीव्हर 1 च्या हालचालीची दिशा बदलते आणि बूट त्याच्या मूळ स्थितीत परत येतो, त्यानंतर इंजिन थांबले पाहिजे.
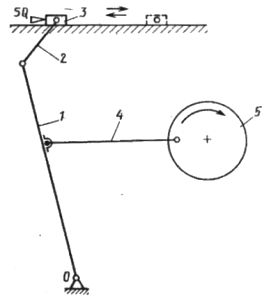
तांदूळ. 1. लीव्हर पुशर कंट्रोलचे योजनाबद्ध आकृती
विचारात घेतलेली यंत्रणा पुशिंग यंत्राचा विशिष्ट प्रतिनिधी आहे.पहिल्या चक्रात, यंत्रणा चालू आणि चालू आहे. दुसऱ्या मापनात ते काम करत नाही. ज्या चक्रात यंत्रणा कार्य करत नाही त्याला शून्य म्हणतात. जरी शू पूर्णपणे परस्पर (पुढे आणि मागे) असला तरी, प्रणोदनासाठी नॉन-रिव्हर्सिबल इलेक्ट्रिक मोटर वापरली जाऊ शकते.
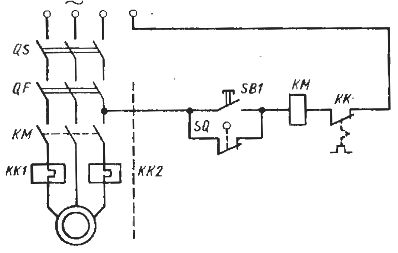
लीव्हर-पिस्टन इलेक्ट्रिक मोटरच्या कंट्रोल सर्किटमध्ये दोन भाग असतात (अंजीर 1 मध्ये ते ठिपकेदार रेषेने वेगळे केले जातात): पॉवर सर्किट आणि कंट्रोल सर्किट.
पॉवर सर्किटच्या घटकांचा उद्देश विचारात घ्या. क्यूएस स्विचला थ्री-फेज करंट पुरवठा केला जातो, जो चुंबकीय स्टार्टरची दुरुस्ती किंवा नुकसान झाल्यास इलेक्ट्रिक मोटरचा वीज पुरवठा खंडित करतो. मग विद्युत प्रवाह सर्किट ब्रेकरमधून वाहतो ज्याचे QF प्रकाशन आकृतीमध्ये दर्शविले आहे. हे शॉर्ट सर्किट करंट्सच्या बाबतीत ड्राइव्हला वीज पुरवठा संरक्षित करण्यासाठी आणि डिस्कनेक्ट करण्यासाठी डिझाइन केले आहे. चुंबकीय स्टार्टर KM चे मुख्य संपर्क इलेक्ट्रिक मोटर M चे वळण चालू किंवा बंद करतात.
थर्मल रिले केके 1 आणि केके 2, ज्याचे हीटिंग घटक पॉवर सर्किट्समध्ये दर्शविलेले आहेत, इलेक्ट्रिक मोटरला दीर्घकाळापर्यंत ओव्हरलोड्सपासून संरक्षित करण्यासाठी डिझाइन केलेले आहेत:
नियंत्रण योजना खालीलप्रमाणे कार्य करते. जेव्हा तुम्ही स्टार्ट बटण SB1 दाबता, तेव्हा चुंबकीय स्टार्टर KM ची कॉइल ऊर्जावान होते आणि त्यामुळे KM च्या पुरवठा सर्किटचे संपर्क बंद होतात आणि विद्युत प्रवाह मोटरच्या वळणात प्रवेश करतो. मोटर रोटर फिरवला जातो आणि ड्रम पुढे जाऊ लागतो. त्याच वेळी, ते मर्यादा स्विच SQ च्या लीव्हरपासून दूर जाते आणि त्याचे संपर्क बंद होते.
जेव्हा स्टार्ट बटण SB1 सोडले जाते आणि त्याचे संपर्क उघडतात, तेव्हा चुंबकीय स्टार्टरच्या KM कॉइलला मर्यादा स्विच SQ च्या संपर्कांद्वारे पॉवर प्राप्त होईल.पुढे गेल्यावर, आणि नंतर मागे गेल्यावर, पिस्टन मर्यादा स्विच SQ चे लीव्हर दाबेल, त्याचे संपर्क उघडतील आणि KM ची कॉइल बंद होईल. यामुळे पॉवर सर्किटमधील KM संपर्क उघडतील आणि इलेक्ट्रिक मोटर थांबेल.
विचारात घेतलेल्या सर्किटमध्ये पॉवर आणि कंट्रोल सर्किट असतात. भविष्यात, केवळ नियंत्रण योजनांचा विचार केला जाईल.
कार्यानुसार, i.e. उद्देशानुसार, सर्किटच्या ऑपरेशनमध्ये सामील असलेले सर्व घटक तीन गटांमध्ये विभागले जाऊ शकतात: नियंत्रण संपर्क, मध्यवर्ती घटक आणि कार्यकारी घटक.
नियंत्रण संपर्क हे घटक आहेत ज्याद्वारे आदेश जारी केले जातात (नियंत्रण बटणे, स्विचेस, लिमिट स्विचेस, प्राथमिक कन्व्हर्टर, रिले संपर्क, इ.).
मध्यवर्ती घटकांचे नाव सूचित करते की ते नियंत्रण आणि कार्यकारी घटकांमधील मध्यवर्ती स्थान व्यापतात. रिले-संपर्क सर्किट्समध्ये, ते टाइम रिले आणि इंटरमीडिएट रिले आणि संपर्क नसलेल्या सर्किट्समध्ये समाविष्ट करतात - लॉजिक गेट्स.
कार्यकारी घटक कार्यकारी यंत्रणा आहेत. तथापि, कंट्रोल सर्किट्स विकसित करताना, ड्राइव्ह यंत्रणा स्वतःच (इलेक्ट्रिक मोटर्स किंवा हीटिंग एलिमेंट्स) वापरली जात नाहीत, परंतु ज्या डिव्हाइसेसमध्ये त्यांचा समावेश आहे, म्हणजे. चुंबकीय स्टार्टर्स, कॉन्टॅक्टर्स इ.
सर्व नियंत्रण संपर्क, त्यांच्या कार्यात्मक तत्त्वानुसार, पाच प्रकारांमध्ये विभागले गेले आहेत: शॉर्ट अॅक्शन (पीसी) सह संपर्क सुरू करा, लाँग अॅक्शन (पीडी) सह संपर्क सुरू करा, शॉर्ट अॅक्शनसह संपर्क थांबवा (ओके), लाँग अॅक्शनसह संपर्क थांबवा (OD). ), स्टार्ट-स्टॉप संपर्क (सॉफ्टवेअर). या संपर्कांना मुख्य म्हणतात.
चक्रीय यंत्रणेच्या नियंत्रणातील सर्व विशिष्ट संपर्कांच्या ऑपरेशनचे सायक्लोग्राम अंजीर मध्ये दर्शविले आहेत. 2.
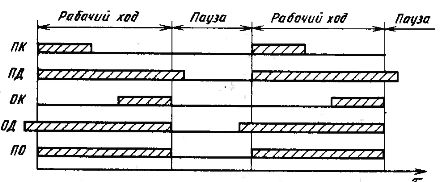
तांदूळ. 2.नियंत्रण संपर्कांचा सायक्लोग्राम
पाच संपर्कांपैकी प्रत्येक संपर्क विशिष्ट क्षणी कार्य करण्यास प्रारंभ करतो (बंद होतो) आणि समाप्त होतो (उघडतो). तर, प्रारंभ संपर्क त्यांचे कार्य वर्किंग स्ट्रोकच्या सुरूवातीस एकत्र सुरू करतात, परंतु YAK संपर्क कार्यरत स्ट्रोक दरम्यान कार्य करणे थांबवते, OD - विराम दरम्यान, म्हणजेच ते फक्त स्विच ऑफ होण्याच्या क्षणी एकमेकांपासून वेगळे असतात ( उघडणे).
संपर्क थांबवणे, जे, संपर्क सुरू करण्याच्या विपरीत, कार्यरत स्ट्रोकच्या शेवटी त्याच वेळी कार्य करणे थांबवतात, ते समाविष्ट करण्याच्या (बंद होणे) क्षणांमध्ये भिन्न असतात. स्टॉप कॉन्टॅक्ट ओके कार्यरत स्ट्रोक दरम्यान त्याचे ऑपरेशन सुरू करते आणि संपर्क ओडी - विराम दरम्यान. केवळ सॉफ्टवेअरचा संपर्कच त्याचे कार्य कार्य अभ्यासक्रमाच्या सुरूवातीस एकत्रितपणे सुरू करतो आणि त्याच्या समाप्तीसह समाप्त होतो.
विचारात घेतलेल्या पाच मुख्य संपर्कांच्या मदतीने, कार्यकारी आणि मध्यवर्ती घटकांवर नियंत्रण ठेवण्यासाठी चार योजना प्राप्त करणे शक्य आहे, ज्यांना विशिष्ट योजना (चित्र 3) म्हणतात.

तांदूळ. 3. एक्झिक्युटिव्ह आणि इंटरमीडिएट सर्किट्ससाठी ठराविक नियंत्रण योजना
प्रथम ठराविक सर्किट (Fig. 3, a) मध्ये फक्त एक सॉफ्टवेअर नियंत्रण संपर्क आहे. जर ते बंद असेल, तर विद्युत प्रवाह अॅक्ट्युएटर X मधून वाहते आणि जर ते उघडे असेल तर विद्युत प्रवाह वाहत नाही. PO संपर्काचा स्वतःचा अर्थ आहे आणि इतर सर्व संपर्क जोड्यांमध्ये वापरणे आवश्यक आहे (प्रारंभ आणि थांबा).
दुसऱ्या ठराविक सर्किटमध्ये सतत कृतीसह दोन नियंत्रण संपर्क आहेत: पीडी आणि ओडी (चित्र 3, बी).
तिसऱ्या ठराविक सर्किटमध्ये कॉम्प्युटरचा स्टार्ट कॉन्टॅक्ट आणि स्टॉप कॉन्टॅक्ट ओडीचा समावेश असतो, कंट्रोल कॉन्टॅक्ट्सच्या व्यतिरिक्त, या सर्किटमध्ये ब्लॉकिंग कॉन्टॅक्ट एक्सचा समावेश असावा, ज्याद्वारे अॅक्ट्युएटर एक्सला संपर्क सुरू झाल्यानंतर पॉवर मिळत राहील. संगणक उघडला आहे (चित्र 3, c).
चौथी ठराविक योजना दोन अल्प-मुदतीच्या संपर्कांवर आधारित आहे: संगणक सुरू करा आणि ओके थांबवा, समांतर कनेक्ट केलेले (चित्र 3, डी).
दिलेल्या चार वैशिष्ट्यपूर्ण योजना (जसे की क्यूब्समधून) संपर्क नियंत्रित करण्यासाठी जटिल समांतर-सीरियल योजना तयार करण्यास परवानगी देतात. म्हणून, उदाहरणार्थ, विचाराधीन लीव्हर नियंत्रण योजना (चित्र 1 पहा) चौथ्या वैशिष्ट्यपूर्ण योजनेवर आधारित आहे. हे पुश बटण SB1 शॉर्ट-टर्म स्टार्ट कॉन्टॅक्ट आणि SQ लिमिट स्विच शॉर्ट-टर्म स्टॉप कॉन्टॅक्ट म्हणून वापरते.
अंतर्ज्ञानी पद्धतीचा वापर करून नियंत्रण योजना काढताना, नियंत्रण संपर्काचा प्रकार, म्हणजेच त्याच्या क्रियेचा कालावधी योग्यरित्या निर्धारित करणे आवश्यक आहे.
नमुनेदार योजनांचा वापर करून अंतर्ज्ञानी पद्धत वापरून नियंत्रण योजना विकसित करण्याचे उदाहरण विचारात घ्या.
इंडक्टर नियंत्रित करण्यासाठी अर्ध-स्वयंचलित उपकरण आणि उच्च-फ्रिक्वेंसी करंटसह उत्पादन गरम करण्यासाठी आणि नंतर वॉटर जेट्ससह थंड करण्यासाठी डिझाइन केलेले इन्स्टॉलेशन फवारण्यासाठी डिव्हाइस विकसित करणे आवश्यक आहे. इंडक्टरमध्ये उत्पादन तापण्याची वेळ 12 s आहे आणि थंड होण्याची वेळ 8 तास आहे. उत्पादन इंडक्टरमध्ये मॅन्युअली इंस्टॉल केले आहे.
प्रथम, आम्ही अर्ध-स्वयंचलित उपकरणाच्या ऑपरेशनचे विश्लेषण करू आणि सर्व कार्यकारी आणि मध्यवर्ती घटक निर्धारित करू. कार्यकर्ता स्वतः उत्पादन इंडक्टरमध्ये स्थापित करतो आणि प्रारंभ बटण दाबतो.या टप्प्यावर, इंडक्टर चालू होतो आणि उत्पादन गरम करणे सुरू होते. त्याच वेळी, हीटिंग वेळ (12 से) लक्षात घेऊन वेळ रिले देखील चालू केला पाहिजे.
यावेळी रिले (अधिक तंतोतंत, त्याचे संपर्क) इंडक्टर बंद करते आणि स्प्रिंकलर चालू करते, जे थंड होण्यासाठी पाणी पुरवते. त्याच वेळी, थंड होण्याची वेळ मोजण्यासाठी दुसरा रिले चालू करणे आवश्यक आहे, म्हणजेच स्प्रेअर बंद करणे. अशा प्रकारे, चार घटकांवर नियंत्रण ठेवणे आवश्यक आहे: एक इंडक्टर, एक स्प्रे डिव्हाइस आणि दोन वेळ रिले.
इंडक्टर कॉन्टॅक्टरद्वारे चालू आणि बंद केला जातो, म्हणूनच नंतरचे नियंत्रण करणे आवश्यक आहे. स्प्रेअर सोलनॉइड वाल्व्हद्वारे नियंत्रित केले जाते.
कॉन्टॅक्टर KM1 ची कॉइल (कॉइल), सोलेनोइड व्हॉल्व्ह KM2 ची कॉइल आणि टाइम रिले KT1 आणि K.T2 चे कॉइल अनुक्रमे नियुक्त करू. अशा प्रकारे, आमच्याकडे दोन अॅक्ट्युएटर आहेत: KM1 आणि KM2 आणि दोन मध्यवर्ती घटक: KT1 आणि KT2.
केलेल्या विश्लेषणावरून, असे दिसून येते की हीटिंग प्रथम सुरू झाले पाहिजे, म्हणजेच, कॉइल KM1 उत्तेजित होईल. SB ट्रिगर बटण (लहान क्रिया) प्रारंभ संपर्क म्हणून वापरले जाते. अशा प्रकारे, एकतर तिसरी किंवा चौथी ठराविक योजना लागू आहे.
इंडक्टरला वेळ रिले KT1.1 च्या संपर्कांपासून डिस्कनेक्ट होऊ द्या, जे या प्रकरणात दीर्घ-अभिनय संपर्क आहेत. म्हणून, आम्ही तिसरी ठराविक योजना निवडतो. चुंबकीय स्टार्टर केएम 1 च्या वळणासह, टाइम रिले केटी 1 चालू करणे आवश्यक आहे, जे त्यांना समांतर कनेक्ट करून करणे खूप सोपे आहे.
परिणामी सर्किटच्या ऑपरेशनचा विचार करा (Fig. 4, a).
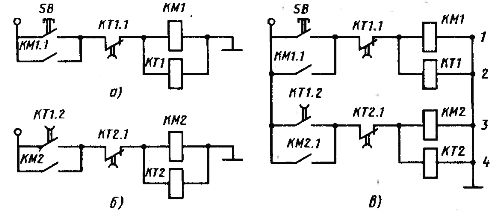
तांदूळ. 4.कंट्रोल सर्किट्स: a — इंडक्टर आणि रिले हीटिंग वेळेसाठी, b — स्प्रिंकलर डिव्हाइस आणि रिले कूलिंग वेळ, c — संपूर्णपणे इंस्टॉलेशन
जेव्हा तुम्ही स्टार्ट बटण SB दाबता, तेव्हा कॉन्टॅक्टर KM1 ची कॉइल उर्जावान होते, म्हणजेच उत्पादन गरम करणे सुरू होते. त्याच वेळी, टाइम रिले केटी 1 ची कॉइल ऊर्जावान होते आणि गरम होण्याची वेळ मोजण्यास सुरवात करते. ब्लॉकिंग संपर्क KM1.1 च्या मदतीने, ट्रिगर बटण SB सोडल्यानंतरही कॉइल KM1 चे व्होल्टेज राखले जाईल, म्हणजे. त्याचे संपर्क उघडल्यानंतर.
हीटिंग वेळ कालबाह्य झाल्यानंतर, वेळ रिले KT1 कार्य करेल, त्याचा संपर्क KT1.1 उघडेल. यामुळे KM1 कॉइल बंद होईल (उत्पादन गरम करणे समाप्त होईल). स्प्रेअर आता चालू केले पाहिजे. संपर्क बंद करून वेळ रिले KT1 द्वारे ते चालू केले जाऊ शकते. स्प्रेअर चालू असताना, वेळ रिले KT1 बंद केला जातो. त्यामुळे, बंद होणारा संपर्क KT1.1 हा अल्पकालीन संपर्क असेल. म्हणून, आम्ही पुन्हा तिसरी ठराविक योजना वापरू.
स्प्रेअरसह, वेळ रिले केटी 2 चालू करणे आवश्यक आहे, जे थंड होण्याची वेळ मोजते. या उद्देशासाठी, आम्ही लागू केलेले तंत्र वापरू आणि टाइम रिले KT2 ची कॉइल KM2 सह समांतर जोडू. अशा प्रकारे आम्हाला दुसरी नियंत्रण योजना मिळते (Fig. 4, b). दोन सर्किट्स (Fig. 4, a आणि b) एकत्र करून, आम्हाला एक सामान्य नियंत्रण योजना मिळते (Fig. 4, c).
आता सर्किटच्या संपूर्ण ऑपरेशनचा विचार करूया (चित्र 4, c). जेव्हा तुम्ही एसबी स्टार्ट बटण दाबता, तेव्हा कॉन्टॅक्टर KM1 आणि टाइम रिले KT1 चे कॉइल्स ऊर्जावान होतात आणि उत्पादन तापू लागते.12 सेकंदांनंतर, टाइम रिले KT1 कार्य करेल आणि सर्किट 1 मधील त्याचे संपर्क उघडतील आणि सर्किट 2 मध्ये बंद होतील. उत्पादन थंड होण्यास सुरवात होईल. त्याच बरोबर सोलेनोइड व्हॉल्व्हच्या कॉइल KM2 सह, टाइम रिले K ची ऊर्जा T2 केली जाईल, थंड होण्याच्या वेळेची मोजणी केली जाईल. जेव्हा संपर्क KT2.1 (सर्किट 3) उघडतो, तेव्हा वाल्व KM2 आणि टाइम रिले KT2 बंद केला जातो आणि सर्किट त्याच्या मूळ स्थितीकडे परत येते.
परिणामी इंडक्टर आणि स्प्रिंकलर नियंत्रण योजना अंतर्ज्ञानी पद्धत वापरून विकसित केली गेली. तथापि, ही योजना योग्य आणि इष्टतम असेल याचा कोणताही पुरावा नाही. सर्किटच्या कार्यक्षमतेचा प्रश्न त्याचे उत्पादन आणि काळजीपूर्वक प्रायोगिक पडताळणीनंतरच सोडवला जाऊ शकतो. अंतर्ज्ञानी पद्धतीचा हा सर्वात मोठा दोष आहे. विश्लेषणात्मक पद्धतीमध्ये नोंद केलेली कमतरता अनुपस्थित आहे. नियंत्रण योजना विकसित करण्याच्या विश्लेषणात्मक पद्धतीबद्दल पुढील लेखात चर्चा केली जाईल.