कन्व्हेयर ड्राइव्ह चेन
 लेख काही कन्वेयरच्या इलेक्ट्रिकल ड्राइव्ह योजनांचे परीक्षण करतो. अंजीर मध्ये. 1 वैयक्तिक कन्व्हेयर लाइनच्या इलेक्ट्रिक ड्राईव्हचे एक योजनाबद्ध आकृती दर्शविते, ज्याची गती काटेकोरपणे समान असणे आवश्यक आहे. अशी गरज सतत उत्पादनामध्ये उद्भवते, जेव्हा भिन्न उत्पादने, स्वतंत्र ओळींवर आवश्यक तांत्रिक ऑपरेशन्सनंतर, एकमेकांशी काटेकोरपणे असेंब्ली साइटवर भेटली पाहिजेत.
लेख काही कन्वेयरच्या इलेक्ट्रिकल ड्राइव्ह योजनांचे परीक्षण करतो. अंजीर मध्ये. 1 वैयक्तिक कन्व्हेयर लाइनच्या इलेक्ट्रिक ड्राईव्हचे एक योजनाबद्ध आकृती दर्शविते, ज्याची गती काटेकोरपणे समान असणे आवश्यक आहे. अशी गरज सतत उत्पादनामध्ये उद्भवते, जेव्हा भिन्न उत्पादने, स्वतंत्र ओळींवर आवश्यक तांत्रिक ऑपरेशन्सनंतर, एकमेकांशी काटेकोरपणे असेंब्ली साइटवर भेटली पाहिजेत.
योजना तुम्हाला एकाच वेळी अनेक कन्व्हेयर लाईन्स सुरू आणि थांबवण्याची आणि त्यांची गती समायोजित करण्याची परवानगी देते. कॉमन इन्व्हर्टर फ्रिक्वेंसी कन्व्हर्टरसह सिंक्रोनस शाफ्ट स्कीमनुसार मोटर्स स्विच करून समन्वित हालचाल साध्य केली जाते. मोटर्स डी 1 आणि डी 2 चे वेग नियंत्रण व्हेरिएबल रेशो गियरबॉक्स पी वापरून इन्व्हर्टरची गती बदलून केले जाते.
कन्व्हेयर सुरू करण्याची परवानगी ऑपरेटरद्वारे दिली जाते जे सर्वात गंभीर भागात कन्व्हेयरच्या ऑपरेशनचे निरीक्षण करतात. जेव्हा तयार बटणे G1 आणि G2 दाबली जातात, तेव्हा सिग्नल दिवे LS1 आणि LS2 उजळतात आणि रिले RG1 आणि RG2 सक्रिय होतात. नंतरचे आरपी सुरू करण्यासाठी रिले तयार करतात.
जेव्हा तुम्ही स्टार्ट बटण दाबता, तेव्हा RP ट्रिगर होतो, जो कॉन्टॅक्टर L1 चालू करतो. इन्व्हर्टर स्थिती, D1 आणि D2 चे सिंगल-फेज सिंक्रोनाइझेशन आहे. वेळेच्या विलंबानंतर, कॉन्टॅक्टर्स L1 आणि L2 मध्ये तयार केलेले पेंडुलम रिले वैकल्पिकरित्या L2 चालू, L1 बंद आणि LZ चालू करतात. फ्रिक्वेंसी कन्व्हर्टर मोटरच्या रियोस्टॅटची सुरूवात वेळेच्या तत्त्वानुसार केली जाते (वेळ रिले आरयू 1, आरयू 2, आरयूझेड).
अंजीर मध्ये. 2 सबवे एस्केलेटरच्या इलेक्ट्रिक ड्राईव्हचे आकृती दर्शविते, जे तुम्हाला प्रवाशांच्या वाढ आणि घसरणीवर कार्य करण्यास अनुमती देते. 200 kW पर्यंतच्या पॉवरसह फेज रोटरसह असिंक्रोनस मोटर ड्राइव्ह मोटर म्हणून वापरली जाते. दिवसाच्या विशिष्ट वेळी, प्रवाशांच्या क्षुल्लक प्रवाहासह, एस्केलेटर बराच काळ जवळजवळ निष्क्रिय स्थितीत काम करू शकते.
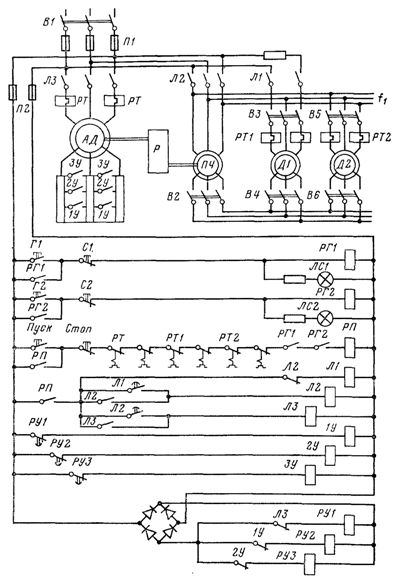
तांदूळ. 1. समन्वित हालचालींसह कन्व्हेयर लाईन्सच्या इलेक्ट्रिकल ड्राइव्हची योजना.
मोटरचा पॉवर फॅक्टर आणि कार्यक्षमता वाढवण्यासाठी, जेव्हा त्याचे शाफ्ट लोड नाममात्राच्या 40% पर्यंत कमी केले जाते, तेव्हा स्टेटर विंडिंग डेल्टा ते स्टारवर स्विच केले जाते. जसजसा भार वाढतो तसतसे ते परत त्रिकोणात वळते.
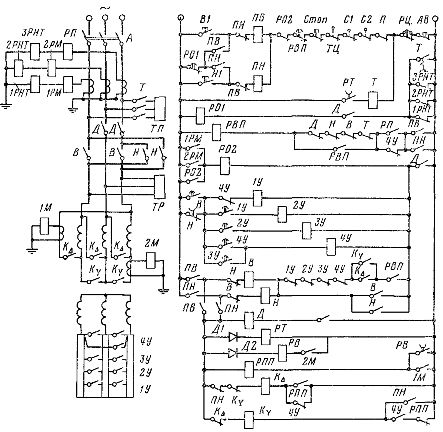
तांदूळ. 2. सबवे एस्केलेटरच्या इलेक्ट्रिक ड्राइव्हची योजना.
सेड स्विचिंग ओव्हरकरंट रिले 1M आणि 2M द्वारे स्वयंचलितपणे केले जाते, जे RPP आणि РВ रिलेद्वारे k∆ आणि kY कॉन्टॅक्टर्स नियंत्रित करतात. ओपनिंग विलंब RV संपर्क 2M बंद आणि 1M चालू दरम्यानच्या कालावधीत RPP कॉइल सर्किटची उपस्थिती सुनिश्चित करतो.
पूर्ण लोडसह जनरेटर डिसेंट मोडमध्ये, क्लाइंब मोडमध्ये समान लोडपेक्षा इंजिन लक्षणीयरीत्या कमी लोड केले जाते (इंस्टॉलेशनच्या यांत्रिक नुकसानामुळे).म्हणून, ड्रूप मोडमध्ये, मोटरचे स्टेटर विंडिंग नेहमी तारेने जोडलेले असते. प्रवेगक कॉन्टॅक्टर्स 1U-4U वर पेंडुलम रिले वापरून वेळेचे कार्य म्हणून मोटर सुरू केली जाते. थांबा यांत्रिक आहे. या प्रकरणात, मोटर शाफ्टवर सर्व्हिस ब्रेक टीपी स्थापित केला जातो आणि गीअर आणि मोटर शाफ्टमधील यांत्रिक कनेक्शन तुटल्यास शिडी थांबते याची खात्री करण्यासाठी ड्राइव्ह गीअर शाफ्टवर सुरक्षा टीपी स्थापित केला जातो.
सर्किट मागील विभागात वर्णन केलेले वैशिष्ट्यपूर्ण सुरक्षा इंटरलॉक लागू करते: उपकरणाच्या यांत्रिक भागाच्या खराबीमुळे - चेन आणि हँडरेल्स काढून टाकणे (सीमा स्विचेस टीसी, पी), चरणांच्या संरचनेचे उल्लंघन (सी 1 आणि सी 2 स्विचेस मर्यादा). ), बियरिंग्जचे जास्त तापमान (थर्मल रिले 7), ओव्हरस्पीड (सेन्ट्रीफ्यूगल स्पीड रिले आरसी) पासून.
याव्यतिरिक्त, मोटर संरक्षण प्रदान केले आहे: जास्तीत जास्त (रिले 1RM, 2RM), ओव्हरलोडपासून (रिले आरपी), मोटरमधून वीज गमावण्यापासून (शून्य वर्तमान रिले 1RNT, 2RNT, 3RNT), पॉवर कॉन्टॅक्टर्सच्या बंद संपर्कांच्या वेल्डिंगपासून. ( कॉइल सर्किट RVP मध्ये D, Y, B, T आणि कॉइल सर्किट B मध्ये 1U-4U उघडणे).
पॉवर लॉस, बेअरिंग ओव्हरहाटिंग आणि मोटार ओव्हरलोड विरूद्ध संरक्षण वेळ रिले PO1 आणि RVP द्वारे निर्धारित वेळेच्या विलंबाने चालते. रिमोट कंट्रोल स्पीड रिले वगळता सर्व संरक्षण, मोटरला मेनपासून डिस्कनेक्ट करून आणि TP सर्व्हिस ब्रेक लावून थांबवतात. ब्रेकिंग प्रक्रियेच्या शेवटी, पीटी रिलेचा विलंब कालबाह्य झाल्यानंतर, सुरक्षा ब्रेक टीपी अतिरिक्तपणे कार्यान्वित केला जातो.जेव्हा RC स्पीड रिले कार्यान्वित होते किंवा आपत्कालीन स्टॉप बटण दाबले जाते, तेव्हा दोन्ही ब्रेक एकाच वेळी लागू होतात.