स्टेटरच्या पोल जोड्यांची संख्या बदलून इंडक्शन मोटरच्या कोनीय गतीचे नियमन
 ध्रुव जोड्यांची संख्या वाढत असताना, क्षेत्राचा कोनीय वेग कमी होतो, त्यामुळे इंडक्शन मोटरच्या रोटरचा वेग देखील कमी होतो. विशेष आवृत्ती दोन-स्पीड असिंक्रोनस मोटर्स, ज्याचे स्टेटर विंडिंग वेगळे भाग असतात. ते पुन्हा दोन वेगवेगळ्या प्रकारे जोडले जाऊ शकतात: एक तारा आणि दुहेरी तारा (चित्र 1, a, b) किंवा त्रिकोण आणि दुहेरी तारा (Fig. 1, b, d).
ध्रुव जोड्यांची संख्या वाढत असताना, क्षेत्राचा कोनीय वेग कमी होतो, त्यामुळे इंडक्शन मोटरच्या रोटरचा वेग देखील कमी होतो. विशेष आवृत्ती दोन-स्पीड असिंक्रोनस मोटर्स, ज्याचे स्टेटर विंडिंग वेगळे भाग असतात. ते पुन्हा दोन वेगवेगळ्या प्रकारे जोडले जाऊ शकतात: एक तारा आणि दुहेरी तारा (चित्र 1, a, b) किंवा त्रिकोण आणि दुहेरी तारा (Fig. 1, b, d).
दुहेरी ताऱ्यामध्ये, क्षेत्राचा वेग नेहमी तारा किंवा त्रिकोणाच्या दुप्पट असतो. तथापि, हे स्विच समान नाहीत. वस्तुस्थिती अशी आहे की सतत ऑपरेशन दरम्यान जास्तीत जास्त परवानगीयोग्य टॉर्क विंडिंग्सच्या गरम परिस्थितीनुसार जास्तीत जास्त परवानगी असलेल्या फेज करंटद्वारे निर्धारित केला जातो आणि फेज व्होल्टेजच्या स्क्वेअरच्या प्रमाणात स्टेटर फ्लक्सवर अवलंबून असतो. दीर्घकालीन अनुज्ञेय शक्ती देखील समान मूल्यांवर अवलंबून असते.
जर तुम्ही मोटरचे विंडिंग तारेवरून दुहेरी तारेवर स्विच केले, तर फेज व्होल्टेज बदलणार नाही आणि डेल्टा ते दुहेरी तारेवर स्विच करताना ते √3 पट कमी होते. परंतु दुहेरी तारेसह, प्रत्येक टप्प्यातील विद्युत प्रवाह तारा किंवा डेल्टाच्या दुप्पट असू शकतो, कारण प्रत्येक टप्प्यात दोन समांतर शाखा असतात. नंतर आपल्याला आढळून येते की तार्यापासून दुहेरी तार्याकडे जाताना, वेग आणि शक्ती दुप्पट होते, म्हणून गंभीर क्षण स्थिर राहतो (M = P /ω= const).
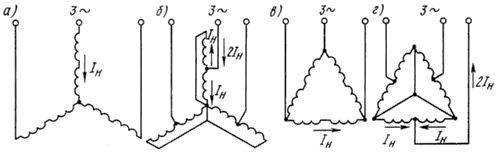
तांदूळ. 1. तारा (a) आणि दुहेरी तारा (b), डेल्टास (c) आणि दुहेरी तारा (d) मध्ये असिंक्रोनस मोटरच्या स्टेटर विंडिंग्ज जोडण्यासाठी योजना
जर तुम्ही डेल्टा ते दुहेरी तारेकडे गेलात, तर फेज व्होल्टेज √3 पट कमी होते. मग, दोन-फेज करंटसह देखील, शक्ती केवळ 2 /√3 = l, 18 पट वाढेल आणि अपरिवर्तित मानली जाऊ शकते. या प्रकरणात, कोनीय वेग दोनच्या घटकाने वाढल्यामुळे, शक्ती जवळजवळ बदलते आणि क्षण अंदाजे दोनच्या घटकाने कमी होतो. अशा प्रकारे, ड्रायव्हिंग लिफ्टिंग डिव्हाइसेससाठी मोटर्स वापरण्याची शिफारस केली जाते ज्यांचे विंडिंग तारेमध्ये जोडलेले आहेत आणि मेटल कटिंग मशीन चालविण्यासाठी, मोटर्स ज्यांचे स्टेटर विंडिंग डेल्टामध्ये जोडलेले आहेत.

तांदूळ. 2. मल्टी-स्पीड मोटरचा पासपोर्ट डेटा
असिंक्रोनस इलेक्ट्रिक मोटर्स आहेत ज्यामध्ये दोन स्टेटर विंडिंग एकमेकांपासून विलग आहेत, त्यापैकी एक स्विच न करता आणि दुसरा स्विचिंग पोलसह. त्यानंतर, तीन-स्पीड इंजिन प्राप्त केले जातात. जर दोन्ही विंडिंग्स पोल-बदललेले असतील, तर मोटर्स चार-स्टेज असतात. काही प्रकरणांमध्ये, वेगवेगळ्या ध्रुव जोड्यांसह दोन इन्सुलेटेड विंडिंग्ज वापरल्या जातात. pp स्विच न करता.उदाहरणार्थ, लिफ्ट मोटर्समध्ये p1 = 3 आणि p2 = 12, जे 1000 आणि 250 rpm च्या रोटेशनच्या सिंक्रोनस गतीशी संबंधित आहे.
अंजीर मध्ये. 3a दोन-स्पीड स्टार-टू-डबल-स्टार मोटर आणि FIG साठी यांत्रिक वैशिष्ट्ये दर्शविते. 3, b — त्रिकोणातून दुहेरी ताऱ्यात बदलताना.
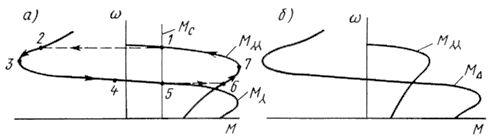
तांदूळ. 3... तारेपासून दुहेरी तारेवर (अ) आणि डेल्टा ते दुहेरी तारेवर (ब) स्विच करताना असिंक्रोनस इलेक्ट्रिक मोटर्सची यांत्रिक वैशिष्ट्ये
उच्च गतीवरून कमी वेगाने वेगाने बदल झाल्यास, इंजिन काही काळ चालते. निलंबन मोड…खरं तर फील्डचा वेग कमी झाला तर पहिल्या क्षणी रोटर त्याच वेगाने फिरत राहतो.
इंजिन त्वरित एका वैशिष्ट्यावरून दुसर्या वैशिष्ट्यावर स्विच करते, म्हणजे. बिंदू 1 पासून बिंदू 2 पर्यंत (चित्र 3, अ). रीजनरेटिव्ह ब्रेकिंग खालीलप्रमाणे (पॉइंट 2, 3, 4), पॉइंट 5 वर ते स्थिर स्थितीत कार्य करण्यास सुरवात करते. जर तुम्ही कमी वेगावरून वरच्या वेगावर स्विच केले, तर मोटर झटपट बिंदू 5 वरून बिंदू b वर सरकते, त्यानंतर प्रवेग येतो (बिंदू 6 आणि 7) आणि बिंदू 1 वर पुन्हा समतोल स्थिती दिसून येते.