ओव्हरहेड क्रेनसह इलेक्ट्रिक ट्रॉली ड्राइव्ह
ओव्हरहेड क्रेन असलेली ट्रॉली हा लिफ्टिंग यंत्राचा एक स्वतंत्र घटक आहे आणि ओव्हरहेड क्रेनच्या मर्यादेत भार हलविण्यासाठी डिझाइन केलेली आहे जी हालचालींच्या तांत्रिकदृष्ट्या निर्धारित गतीसह आणि लोडची स्थिती निश्चित करण्याच्या आवश्यक अचूकतेसह. बोगी ड्राइव्ह हे ओव्हरहेड क्रेन उपकरणांच्या मुख्य घटकांपैकी एक आहे.
ओव्हरहेड क्रेनच्या ट्रॅकवरून ट्रॉली पुढे सरकते. पुल स्वतःच गाडीच्या गतीच्या दिशेने लंब दिशेने फिरतो. कार्टवर एक लिफ्टिंग यंत्रणा स्थापित केली आहे, जी हुक (किंवा इलेक्ट्रोमॅग्नेट) ने सुसज्ज आहे ज्याद्वारे आपण लोड हलवू शकता. बोगीची हालचाल हा ओव्हरहेड क्रेनच्या तांत्रिक चक्राचा अविभाज्य भाग आहे (चित्र 1).
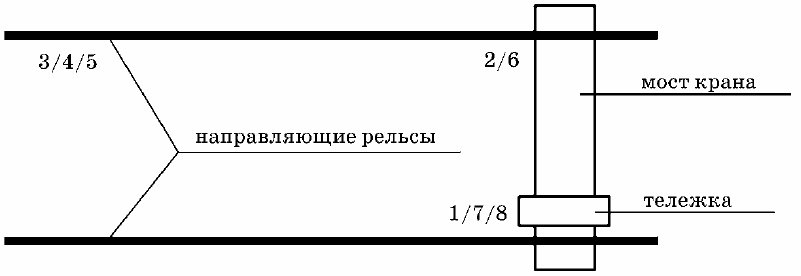
तांदूळ. 1. कार्यरत चक्रात ब्रिज क्रेनसह ऑपरेशन्स करण्यासाठी योजना
या चक्रामध्ये खालील ऑपरेशन्स असतात (आकृती 1 मध्ये, ऑपरेशन क्रमांक संख्यांमध्ये दर्शविलेले आहेत):
1 - भार उचलणे;
2 - दिलेल्या स्थितीत कार्ट हलवणे;
3 - क्रेनला पूर्वनिर्धारित स्थितीत हलवणे;
4 - ओझ्याचे वजन कमी करणे;
5 — भाराच्या वजनाने हुक उचलणे;
6 - क्रेनला त्याच्या मूळ स्थितीत हलविणे;
7 - कार्टला त्याच्या मूळ स्थितीत हलवणे;
8 - हुक कमी करणे.
ओव्हरहेड क्रेनच्या प्रक्रियेच्या चक्रावरून पाहिले जाऊ शकते, ट्रॉली ड्राइव्ह मोटर दुसऱ्या आणि सातव्या ऑपरेशनमध्ये चालू केली जाते. जेव्हा बोगी ओव्हरहेड क्रेनच्या अंतरावर दिलेल्या स्थानापर्यंत पोहोचते, तेव्हा आवश्यक ब्रेकिंग अचूकता सुनिश्चित करण्यासाठी बोगी ड्राइव्हची इलेक्ट्रिक मोटर इलेक्ट्रिकली ब्रेक केली जाते.
त्यानंतर इंजिन बंद केले जाते आणि यांत्रिक ब्रेक लावला जातो. याव्यतिरिक्त, पुलाच्या हालचालीची इलेक्ट्रिक ड्राइव्ह चालू केली जाते आणि तांत्रिक कार्यानुसार भार कार्यशाळेच्या बाजूने फिरतो. नियुक्त ठिकाणी पोहोचल्यावर, क्रेन थांबते, भार कमी केला जातो आणि नंतर आवश्यक तांत्रिक ऑपरेशन्स केल्या जातात.

ओव्हरहेड क्रेनसह ट्रॉली हालचाल यंत्रणेचा किनेमॅटिक आकृती आकृती 2 मध्ये दर्शविला आहे. ड्राईव्हच्या चाकांच्या मध्यभागी गियरबॉक्स असलेल्या योजनेनुसार ट्रॉली हालचालीची यंत्रणा तयार केली जाते.
ब्रेक डिस्क टी, गिअरबॉक्स पी, क्लचेस एम आणि शाफ्ट्स बी द्वारे इलेक्ट्रिक मोटर डी पासून ड्राइव्ह चालत्या चाकांवर प्रसारित केली जाते. कार्ट स्थिर ठेवण्यासाठी ब्रेक पुली वापरली जाते.
कार्टमध्ये चार ट्रॅव्हल व्हील आणि दोन ड्राईव्ह व्हील आहेत. क्रेन ट्रॉलीची ट्रॅव्हलिंग चाके सहसा दोन रिब्सने बनविली जातात.
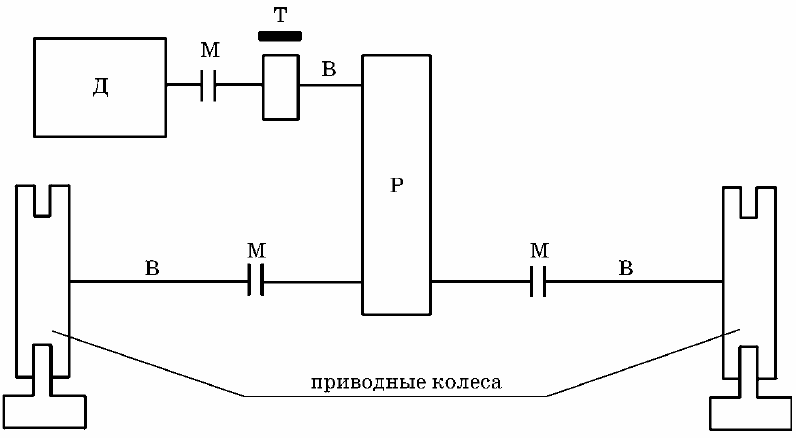
तांदूळ. 2. ट्रॉली हालचाल यंत्रणेचा किनेमॅटिक आकृती
कार्टला निर्दिष्ट स्थानावर हलवण्याची वेळ आवश्यक प्रवेगासह कार्टला गती देण्यासाठी आणि कमी करण्यासाठी वेळ लक्षात घेऊन निर्धारित केली जाईल.तांत्रिक प्रक्रियेच्या अटींवर आधारित, कार्ट हलवताना टॅकोग्राममध्ये आकृती 3 मध्ये दर्शविलेले फॉर्म असावे.
आवश्यक प्रवेगासह दिलेल्या वेगापर्यंत बोगी यंत्रणा सुरळीत सुरू होईल याची खात्री करणे आवश्यक आहे. आवश्यक स्थिती अचूकता सुनिश्चित करण्यासाठी, कमी गतीमध्ये संक्रमणासह इलेक्ट्रिक ड्राइव्हची गुळगुळीत घट आवश्यक आहे, त्यानंतर ट्रॉली थांबते.
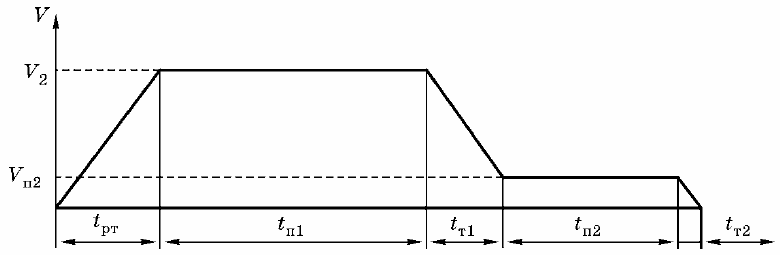
तांदूळ. 3. ट्रॉली चळवळ यंत्रणेचा टॅकोग्राम
रेल्वेच्या सांध्यातील धातूच्या संरचनेवर होणार्या प्रभावांसह बोगीची हालचाल, तीव्र प्रवेग आणि मंदावणे, यंत्रे लोड केल्यावर धातूच्या संरचनेची नैसर्गिक कंपने यामुळे ब्रिज क्रेन बोगीवर असलेल्या विद्युत उपकरणांवर अतिशय तीव्र यांत्रिक परिणाम होतात. यावर आधारित, ट्रॉली हलविण्यासाठी इलेक्ट्रिक ड्राइव्हने खालील आवश्यकता पूर्ण केल्या पाहिजेत:
1) इलेक्ट्रिक ड्राईव्हला गतीमध्ये यंत्रणा सुरू करण्याची, हालचालीची दिशा उलट करण्याची आणि आवश्यक प्रवेग (m / s2) आणि योग्य स्थिती अचूकता (मिमी) सह यंत्रणा थांबविण्याची क्षमता प्रदान करणे आवश्यक आहे;
2) इलेक्ट्रिक ड्राईव्हने मुख्य पासून खाली गुळगुळीत वेग नियंत्रण प्रदान करणे आवश्यक आहे;
3) विकसित इंजिन टॉर्कने दिलेल्या तीव्रतेवर यंत्रणेचे कार्य सुनिश्चित करणे आवश्यक आहे;
4) प्रति तास इंजिन सुरू होण्याच्या दिलेल्या संख्येवर, त्याचे विंडिंग जास्त गरम होऊ नये, ज्यामुळे यंत्रणा दीर्घकाळ थांबणे शक्य आहे;
5) मोटर ऑपरेटिंग परिस्थितीनुसार निवडली जाणे आवश्यक आहे, म्हणजेच, त्याची योग्य रचना असणे आवश्यक आहे आणि त्याचे विंडिंग्स उष्णता-प्रतिरोधक आणि आर्द्रतेपासून इन्सुलेशन असणे आवश्यक आहे;
6) ड्राईव्ह मोटरमध्ये सर्वात लहान फ्लायव्हील वस्तुमान असणे आवश्यक आहे ज्याचा वारंवार ड्राइव्ह सुरू असताना ट्रान्झिएंट्सच्या प्रवाहावर महत्त्वपूर्ण प्रभाव पडतो;
7) ड्राइव्ह मोटर चालू यंत्रणेच्या सामर्थ्याशी जुळली पाहिजे आणि आवश्यक ओव्हरलोड क्षमता असणे आवश्यक आहे;
8) इलेक्ट्रिक ड्राइव्हने कमीतकमी कालावधीसह क्षणिक प्रक्रियांची निर्मिती सुनिश्चित करणे आवश्यक आहे;
9) इलेक्ट्रिक ड्राइव्हच्या डिझाइनमध्ये सुरक्षितता आणि देखभाल सुलभतेचा विचार केला पाहिजे.

उत्पादन सुविधेमध्ये क्षैतिज ट्रॅक लाईनवर कार्य करणार्या मोशन मेकॅनिझमसाठी स्थिर क्षण बीयरिंगमधील घर्षण शक्तींना सरकवून आणि ओव्हरहेड क्रेनच्या रेलिंगवर फिरणाऱ्या बोगीच्या चाकांच्या रोलिंग घर्षणाने तयार केला जातो. ट्रॉलीच्या अग्रेषित हालचाली दरम्यान यंत्रणेचा स्थिर क्षण क्रेनच्या उचलण्याच्या क्षमतेद्वारे निर्धारित केला जातो. बोगीच्या उलट हालचाल दरम्यान यंत्रणेचा स्थिर क्षण अपूर्ण लोडसाठी मोजला जातो.
ओव्हरहेड क्रेनच्या ट्रॉलीच्या इलेक्ट्रिक ड्राइव्हसाठी, एसिंक्रोनस गिलहरी-पिंजरा रोटर मोटर्स (सह व्हेरिएबल फ्रिक्वेन्सी ड्राइव्हचा भाग म्हणून), जखमेच्या रोटर इंडक्शन मोटर्स आणि स्वतंत्रपणे उत्तेजित डीसी मोटर्स.