करवतीसाठी विद्युत उपकरणे
 सॉमिल्समध्ये, बोर्ड, बीम आणि इतर वर्गीकरणांमध्ये गोल लाकूड कापण्यासाठी मुख्य उपकरणे करवतीसाठी मुख्य उपकरणे आहेत.
सॉमिल्समध्ये, बोर्ड, बीम आणि इतर वर्गीकरणांमध्ये गोल लाकूड कापण्यासाठी मुख्य उपकरणे करवतीसाठी मुख्य उपकरणे आहेत.
सॉ फ्रेम हे एक मल्टी-सॉ मशीन आहे ज्यामध्ये आरे कडक फ्रेममध्ये ताणलेली असतात. वर्टिकल सॉमिल्स सिंगल आणि डबल डेक, अरुंद आणि रुंद ओपनिंगमध्ये, जॉगिंग आणि सतत फीडसह तयार केले जातात. नवीनतम सॉमिल फ्रेम्समध्ये तीन ते सहा इलेक्ट्रिक मोटर्स आहेत. क्रँकशाफ्ट रोटेशन गती - 200 ते 600 मिनिटे – 1 पर्यंत, ड्राईव्ह जखमेच्या रोटरसह असिंक्रोनस मोटरद्वारे आणि कधीकधी गिलहरी-पिंजरा रोटर मोटरद्वारे चालविली जाते.
करवतीच्या चौकटीवर (Fig. 1), कपाळावर 3.2-9 मीटर लांबीचे आणि 65 सेमी व्यासाचे लॉग कापले जातात. फ्रेमच्या कास्ट-लोह फ्रेममध्ये ट्रान्सव्हर्स कनेक्शनद्वारे एकमेकांशी जोडलेले दोन पाय आणि बाजूच्या भिंती असतात.
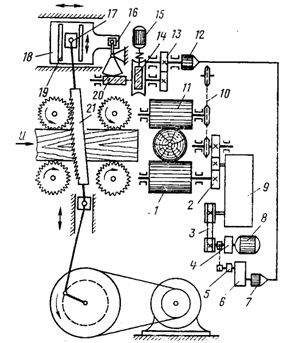
तांदूळ. 1. सॉमिल फ्रेमचा किनेमॅटिक आकृती
करवतीची चौकट बेस प्लेटवर बसवली आहे. दोन फ्लायव्हील्स आणि ड्राईव्ह पुली असलेला क्रँकशाफ्ट प्लेटवर बसवलेल्या दोन मुख्य बेअरिंगमध्ये फिरतो.आय-बीमचा कनेक्टिंग रॉड रोलर बेअरिंगद्वारे क्रँकशाफ्ट पिनला खालच्या डोक्याशी जोडलेला असतो आणि वरचे डोके सुईच्या बेअरिंगद्वारे सॉ फ्रेमच्या खालच्या क्रॉस सदस्याद्वारे पिनशी जोडलेले असते.
सॉ फ्रेमचे खालचे आणि वरचे क्रॉस मेंबर गोल ट्यूबलर सपोर्टने जोडलेले असतात. सॉ फ्रेमच्या क्रॉस मेंबर्सवर पिन असलेले टेक्स्टोलाइट स्लाइडर्स टेपर्ड रोलर बेअरिंग्जने जोडलेले आहेत.
सॉ फ्रेमची रचना हायड्रॉलिक टेंशनर वापरण्याची परवानगी देते. त्याच्या आठ मार्गदर्शकांपैकी, चार प्रिझमॅटिक आहेत आणि चार सपाट आहेत, जे बेडवर बसवलेल्या कास्ट-लोखंडी प्लेट्सशी जोडलेले आहेत. वरच्या मार्गदर्शक प्लेट्स स्लाइडवर आरोहित केल्या जातात आणि प्लॉट Δ च्या आकारानुसार सॉ फ्रेमच्या टिल्टिंग यंत्रणेद्वारे हलविल्या जातात.
फोर-रोलर फीड मेकॅनिझमची वैयक्तिक ड्राइव्ह, ज्यामध्ये थायरिस्टर ड्राइव्ह असते, लॉग फीड गतीचे सहज समायोजन सुनिश्चित करते. इलेक्ट्रोमॅग्नेट, इलेक्ट्रोमॅग्नेटिक क्लच 4, बेल्ट ट्रान्समिशन 3, गिअरबॉक्स 9 आणि गीअर्स 2 द्वारे इंजिन 8 मधून लोअर रोलर्स 1 वर टॉर्क प्रसारित केला जातो. वरचे रोलर्स 11 रोलर चेन 10 मधून फिरतात.
सेंट्रीफ्यूगल रेग्युलेटर 5 चा डायल फिरवून इलेक्ट्रोमॅग्नेटिक क्लच 4 ची स्लाइड बदलून पार्सलचा आकार समायोजित केला जातो. यासाठी, ऑपरेटर सर्वो मोटर 15 चालू करतो, डायलला योग्य कोनात वळवतो, रोटेशन वर्म गियर 14, गीअर्स 13, सेल्सिन सेन्सर 12, सेल्सिन रिसीव्हर 7 आणि रिड्यूसर 6 द्वारे केले जाते.वर्म गियर 20 आणि लीव्हर 16 द्वारे खोली Δ एकाच वेळी बदलून, प्लेट 18 सॉ फ्रेमच्या वरच्या स्लाइड 17 च्या मार्गदर्शक 19 आणि सॉ 21 च्या कलतेसह क्षैतिज विमानात फिरते.
सॉमिल फ्रेम 2P80 चा योजनाबद्ध सर्किट आकृती अंजीर मध्ये दर्शविला आहे. 2. त्याच्या इलेक्ट्रिकल उपकरणांमध्ये 125 kW ची मुख्य शाफ्ट ड्राईव्ह एसिंक्रोनस मोटर M1, सॉ फ्रेम टिल्टिंग मेकॅनिझम ड्राइव्ह M2 मोटर, हायड्रॉलिक स्टेशन मोटर MZ, स्नेहन पंप मोटर M4 आणि स्वयंचलित नियंत्रण प्रणाली, DC मोटर M5 सह थायरिस्टर ड्राइव्हवर आधारित आहे.
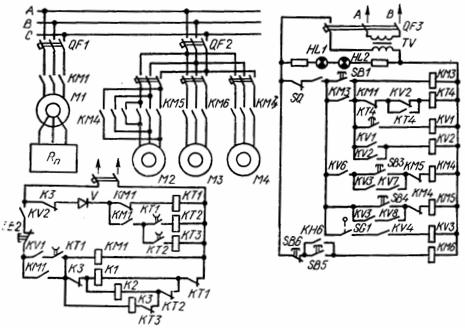
तांदूळ. 2. सॉमिल फ्रेम 2P80 चे इलेक्ट्रिकल स्कीमॅटिक आकृती
मोटर्सचे कमाल वर्तमान संरक्षण स्वयंचलित स्विचेसद्वारे प्रदान केले जाते: QF1 — मोटर M1, QF2 — मोटर्स M2, MZ, M4 आणि QF3 — कंट्रोल सर्किट्स. QF3 चालू असताना, चेतावणी दिवे HL1 आणि HL2 उजळतात. मुख्य शाफ्ट मोटर M1 रेखीय कॉन्टॅक्टर KM1 वापरून सुरू केली आहे, आणि फीड मोटर M5 ची ड्राइव्ह मोटर कॉन्टॅक्टर KM2 वापरून सुरू केली आहे.
इलेक्ट्रिकल कंट्रोल सर्किटमध्ये हे समाविष्ट आहे: पॉवर सर्किट्स (ड्रायव्हिंग मोटर्स); रिले-संपर्क नियंत्रण सर्किट आणि थायरिस्टर डीसी ड्राइव्हवर आधारित स्वयंचलित नियंत्रण प्रणालीचे सर्किट. वरचे गेट उघडे असताना सॉ फ्रेम ड्राइव्ह सुरू करण्यासाठी, मुख्य शाफ्ट आणि व्ही-बेल्ट सुरक्षा पट्ट्या काढल्या जातात आणि जेव्हा सॉ फ्रेम थांबविली जाते, तेव्हा मर्यादा स्विच वापरले जातात (ज्याचा ब्लॉक आकृती 2 मध्ये दर्शविला आहे. SQ अक्षरांसह).
जखमेच्या रोटरसह मोटर एम 1 ची सुरुवात केटी 1, केटी 2 आणि केटी 3 प्रवेग रिले क्रमशः बंद करून वेळेचे कार्य म्हणून चालते, जे दिलेल्या वेळेच्या विलंबाने हळूहळू कॉन्टॅक्टर्स K1, K2 वापरून सुरुवातीच्या रिओस्टॅट आरपीचे तीन टप्पे आउटपुट करतात. आणि K3.
स्टार्ट बटण SB1 (चित्र 2 पहा) दाबल्याने कॉन्टॅक्टर KM3 चे कॉइल चालू होते, जे ऑइल पंपच्या मोटर M4 चे पॉवर कॉन्टॅक्ट KM3 बंद करते, क्लोजिंग कॉन्टॅक्ट KM3 बटण SB1 ला बायपास करते.
इंटरमीडिएट रिले KV1 चा संपर्क KV1 बंद असताना मुख्य मोशन मोटर M1 सुरू होते. या रिलेच्या कॉइलला KT4 टाइम रिलेच्या KT4 संपर्काद्वारे शक्ती प्राप्त होते, जे बंद केल्यावर विलंबाने बंद होईल. म्हणून, रिले केटी 4 मोटर एम 4 आणि एम 1 च्या प्रारंभ दरम्यान विलंब प्रदान करते.
रिले KV1 चालू असताना, रिले KV2 एकाच वेळी चालू होतो, ज्याचा बंद होणारा संपर्क KV2 संपर्ककर्ता KM1 च्या कॉइलला ऊर्जा देतो. कॉइल केएम 1, पॉवर प्राप्त केल्यानंतर, मोटर एम 1 च्या पॉवर सर्किटचे मुख्य संपर्क केएम 1 चालू करते आणि जेव्हा प्रारंभिक रिओस्टॅट पूर्णपणे सेट होईल तेव्हा मोटरचा रोटर फिरण्यास सुरवात करेल. प्रवेग संपर्क K1, K2 आणि K3 मंदावल्यानंतर, मोटर रोटर जास्तीत जास्त वेगाने फिरेल.
जेव्हा मोटर M1 ची सुरूवात पूर्ण होते, तेव्हा उघडणारा संपर्क K3 एकाच वेळी कॉन्टॅक्टर्स K1 आणि K2 चे पुरवठा सर्किट खंडित करेल आणि फीडर M5 च्या मोटर स्टार्टर सर्किटमधील संपर्क K3 बंद करेल आणि ते सुरू करण्यासाठी तयार करेल. SB2 बटण दाबून मोटर थांबते.
हायड्रॉलिक सिस्टीम पुढील आणि मागील दरवाजे वाढवणे आणि कमी करणे प्रदान करते, वेल्डेड आवरणांवर ज्याच्या वरच्या फीड रोलर्स बसवले जातात.हायड्रोलिक स्टेशनद्वारे चालविलेल्या हायड्रॉलिक सिलिंडरद्वारे गेट्स वरच्या स्थितीत उचलले जातात. हायड्रॉलिक स्टेशनची ड्राइव्ह मोटर एम 3 द्वारे प्रदान केली जाते, जी एका बटणाच्या दाबाने सुरू होते, तर स्टार्टरची कॉइल केएम 6 ऊर्जावान होते, जी केएम 6 चे मुख्य संपर्क बंद करते.
सॉ फ्रेमचा टिल्ट मॅन्युअली (SB3 आणि SB4 बटण दाबून) किंवा स्वयंचलितपणे नियंत्रित केला जाऊ शकतो. स्टार्टर KM4 ("अधिक") च्या विंडिंग KM4 आणि स्टार्टर KM5 ("कमी") च्या KM5 च्या स्वयंचलित नियंत्रणासह, त्यांना रिले KV3 द्वारे पॉवर प्राप्त होते, जे मोड स्विच "स्वयंचलित" स्थितीत असताना चालू होते. , तेव्हा संपर्क SQ1 बंद आहे.
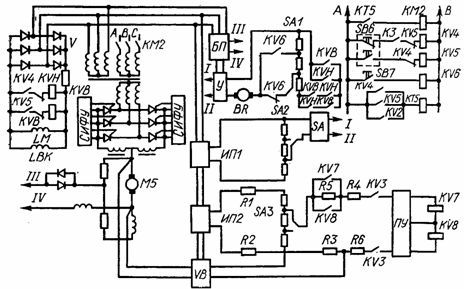
थायरिस्टर पॉवर सप्लायमध्ये M5 DC मोटर आणि थायरिस्टर कन्व्हर्टर असते. थायरिस्टर कन्व्हर्टर (Fig. 9.2, c) स्टार्टर KM2 द्वारे, संपर्क KV3 द्वारे चालू केले जाते, ज्याची कॉइल त्याच्या सर्किटमध्ये असलेल्या टाइम रिले KT5 चा संपर्क बंद झाल्यावर पॉवर प्राप्त करते. कॉइल KV4 (फॉरवर्ड मोशन) किंवा KV5 (रिव्हर्स मोशन) उर्जावान झाल्यावर टायमिंग रिले KT5 ऊर्जावान होईल.
कापताना लॉग अडकल्यास, इंजिन उलट करून ते मागे घेतले जाते. फीडर मोटर सुरू करणे M1 मोटर चालविल्याशिवाय शक्य नाही. पुरवठा सर्किट KV4 मध्ये संपर्क K3 समाविष्ट करून हे सुनिश्चित केले जाते, जे मोटर M1 सुरू झाल्यानंतर बंद होते. जेव्हा स्टार्टर KM2 चालू असतो, तेव्हा मोटरचे कन्व्हर्टर आणि फील्ड विंडिंग LM ऊर्जावान होतात.
जर रजिस्टर अडकले असेल, तर SB6 बटण दाबल्याने रिले KV4 आणि KVB बंद होतात आणि KV5 आणि KVH रिले चालू होतात.या प्रकरणात, केव्हीएच रिले एम्पलीफायर यू च्या पुरवठा सर्किटमध्ये त्याचे संपर्क बंद करते, जे थायरिस्टर कन्व्हर्टरमध्ये समाविष्ट आहे, परिणामी, कनवर्टरच्या आउटपुटवर व्होल्टेजची ध्रुवीयता बदलते आणि मोटरची दिशा बदलते. रोटेशन

जेव्हा लोड बदलते तेव्हा घूर्णन गतीची स्थिरता नकारात्मक अभिप्रायाद्वारे सुनिश्चित केली जाते, जी एलबीएल उत्तेजना कॉइलसह बीआर टॅकोजनरेटरद्वारे लागू केली जाते. आर्मेचर BR हे अॅम्प्लीफायर V च्या इनपुटशी जोडलेले आहे. थायरिस्टर कन्व्हर्टर सर्किटमध्ये रीजनरेटिव्ह ब्रेकिंगच्या वापराने क्षणिक सक्ती केली जाते.
फीड दर स्वहस्ते आणि स्वयंचलितपणे समायोजित केला जातो. यासाठी, एसए स्विच सेट आहे. मॅन्युअल फीड रेट रेग्युलेशनमध्ये, रेट रेग्युलेटर सर्किट I आणि II द्वारे अॅम्प्लीफायर U शी जोडलेले आहे. स्पीड कंट्रोलर्स SA1 - SA3 हे पॅनेलचे स्विचेस आहेत ज्यांना MLT रेझिस्टर जोडलेले आहेत.
जंगम संपर्क SA1 हलवण्याने PU अॅम्प्लिफायरद्वारे पल्स-फेज कंट्रोल सिस्टम (SPPC) मध्ये प्रवेश करणारा नियंत्रण सिग्नल बदलतो, जो ब्रिज रेक्टिफायर सर्किटद्वारे जोडलेल्या थायरिस्टर्सचा फायरिंग कोन बदलतो, ज्यामुळे मोटर M5 ची गती बदलते.
SA स्विचद्वारे M5 इंजिनची गती आपोआप समायोजित करण्यासाठी, SA1 अॅम्प्लिफायर ब्लॉक Y वरून डिस्कनेक्ट केले जाते आणि अॅम्प्लिफायर Y SA2 - जर्नल व्यास सेन्सरशी कनेक्ट केले जाते. या प्रकरणात, SA1 ला SA2 कडून पॉवर मिळण्यास सुरुवात होते, जो एक पॉटेंटिओमीटर आहे जो स्थिर विद्युत पुरवठा IP1 शी जोडलेला आहे आणि पॉवर स्विचिंग यंत्रणेद्वारे फिरवला जातो.
जर्नलचा व्यास बदलतो तेव्हा, पोटेंशियोमीटर SA2 चा स्लाइडर हलतो आणि SA1 वर लागू केलेल्या नियंत्रण व्होल्टेजचे मूल्य बदलते, म्हणून जर्नलच्या व्यासातील बदलासह फीड दर बदलतो. गती मूल्य सॉ फ्रेम उताराशी जुळले पाहिजे, वेग SA3 स्विच करून नियंत्रित केला जातो.
सॉ फ्रेम टिल्ट सेन्सर SA3 हे प्रतिरोधक R1 आणि R2 द्वारे स्थिर विद्युत पुरवठा IP2 शी जोडलेले आहे. परिणाम म्हणजे सॉ फ्रेमच्या झुकाव कोनाच्या प्रमाणात ताण आहे. या व्होल्टेजची तुलना मोटर व्होल्टेज M5 शी केली जाते, गतीच्या प्रमाणात, मोटर आर्मेचरमधून घेतले जाते आणि रेक्टिफायर ब्लॉक VB द्वारे रेझिस्टर R3 ला दिले जाते, ते सॉ फ्रेमच्या टिल्ट सेन्सरच्या आउटपुट व्होल्टेजमधून वजा केले जाते.
उलट मोटरसह, VB ब्लॉक सतत संदर्भ ध्रुवीयता राखते. रेझिस्टर R4 — R6 आणि बंद होणारे संपर्क KV3 (स्वयंचलित समायोजनादरम्यान बंद) द्वारे इंटरमीडिएट अॅम्प्लीफायर PU च्या इनपुटवर न जुळणारा सिग्नल दिला जातो. सिग्नल वाढविला जातो आणि PU आउटपुटला दिला जातो, ज्यावर KV7 आणि KV8 रिले जोडलेले असतात. त्रुटी इनपुट सिग्नलच्या ध्रुवीयतेवर अवलंबून ते ट्रिगर केले जातात.
तर, फीड रेट जसजसा वाढतो, मोटरमधून काढलेला व्होल्टेज वाढतो आणि न जुळणारे मूल्य ऋण असते. या प्रकरणात, फीड दर आणि सॉ फ्रेमचा कल यांच्यातील संबंध तुटलेला आहे. PU अॅम्प्लिफायरच्या प्रवर्धित आउटपुट सिग्नलमध्ये रिले KV7 समाविष्ट आहे, ज्याच्या बंद संपर्कांमध्ये कॉइल KM4 समाविष्ट आहे.
KM4 बंद होणारे संपर्क M2 मोटर "पुढे" वळवतात — सॉ फ्रेमचा झुकाव वाढवते.त्याच वेळी, पोटेंशियोमीटर स्लाइडर हलवून SA3 वर आउटपुट व्होल्टेज वाढवले जाते. विचलन सिग्नल शून्यावर कमी होण्यास सुरवात होते, ज्यानंतर सॉ फ्रेमच्या झुकावातील वाढ थांबते. हे फीड दर आणि सॉ फ्रेमचा कोन यांच्यातील जुळणी राखते.
नियंत्रण प्रक्रिया फीड रेट कमी करून त्याच प्रकारे पुढे जाते, परंतु या प्रकरणात त्रुटी सिग्नलमध्ये सकारात्मक चिन्ह आहे. यामुळे रिले KV8 चालू होते, तसेच KM5 आणि मोटर M2 उलटते. फीड रेट कमी झाल्यामुळे, सॉ फ्रेमचा उतार देखील कमी होतो. नियमन दरम्यान, ड्राइव्ह संपर्क KV7 आणि KV8 प्रतिकार R5 बायपास करतात, ज्यामुळे प्रक्रियेस सक्ती करणे शक्य होते.
कटिंगच्या सुरूवातीस, कार्यरत फीड गतीच्या 30% पेक्षा जास्त नसलेली कटिंग गती असणे आवश्यक आहे. हे खालील प्रकारे केले जाते. SB7 बटण दाबून, रिले KV6 ऊर्जावान होते, ज्याचे संपर्क आउटपुट SA1 वर स्विच केले जातात, जेणेकरून एक छोटा कंट्रोल व्होल्टेज बंद होणारा संपर्क KV6 द्वारे थायरिस्टर कन्व्हर्टरच्या इनपुटला पुरवला जातो, ज्यामुळे कमी कटिंग गती निर्माण होते. .
फीडच्या समाप्तीनंतर, SB7 बटण बंद केले जाते आणि डिव्हाइस कार्यरत मोडमध्ये जाते. फीड दरम्यान सॉ फ्रेमच्या झुकण्यासाठी स्वयंचलित नियंत्रण प्रणालीचा व्यत्यय क्लोजिंग कॉन्टॅक्ट KV6 ला पुरवठा सर्किटशी कनेक्ट करून प्रदान केला जातो. स्टार्टर कॉइल्स KM4 आणि KM5.