वैकल्पिक चालू विद्युत मशीन
यांत्रिक ऊर्जेचे विद्युत उर्जेमध्ये (AC आणि DC जनरेटर) आणि त्याउलट (इलेक्ट्रिक मोटर्स) मध्ये रूपांतर करण्यासाठी इलेक्ट्रिक मशीनचा वापर केला जातो.
या सर्व प्रकरणांमध्ये, इलेक्ट्रोमॅग्नेटिझमच्या क्षेत्रातील मूलत: तीन मुख्य शोध वापरले जातात: 1821 मध्ये अँपिअरने शोधलेल्या प्रवाहांच्या यांत्रिक परस्परसंवादाची घटना, 1831 मध्ये फॅराडेने शोधलेली इलेक्ट्रोमॅग्नेटिक इंडक्शनची घटना आणि या घटनेचा सैद्धांतिक सारांश. लेन्झ (1834) यांनी प्रेरित विद्युत् प्रवाहाच्या दिशेच्या त्यांच्या सुप्रसिद्ध कायद्यात (खरं तर, लेन्झच्या कायद्याने विद्युत चुंबकीय प्रक्रियेसाठी ऊर्जेच्या संवर्धनाच्या कायद्याची भविष्यवाणी केली होती).

यांत्रिक उर्जेचे विद्युत उर्जेमध्ये किंवा त्याउलट रूपांतर करण्यासाठी, विद्युत् प्रवाह आणि चुंबकीय क्षेत्र (चुंबक किंवा प्रवाह) असलेल्या प्रवाहकीय सर्किटची सापेक्ष हालचाल तयार करणे आवश्यक आहे.
सतत ऑपरेशनसाठी डिझाइन केलेल्या इलेक्ट्रिक मशीनमध्ये, स्थिर भाग (स्टेटर) च्या आत स्थित मशीनच्या फिरत्या भागाची (पर्यायी वर्तमान मशीनचा रोटर) रोटरी गती वापरली जाते.चुंबकीय क्षेत्र तयार करण्यासाठी काम करणाऱ्या यंत्राच्या कॉइलला इंडक्टर म्हणतात आणि ऑपरेटिंग करंटसह वाहणाऱ्या कॉइलला आर्मेचर म्हणतात. या दोन्ही नंतरच्या संज्ञा DC मशीनसाठी देखील वापरल्या जातात.
चुंबकीय प्रेरण वाढविण्यासाठी, मशीन विंडिंग्स फेरोमॅग्नेटिक बॉडीज (स्टील, कास्ट लोह) वर ठेवल्या जातात.
सर्व इलेक्ट्रिक मशीन्समध्ये रिव्हर्सिबिलिटीचा गुणधर्म असतो, म्हणजेच ते विद्युत उर्जेचे जनरेटर आणि इलेक्ट्रिक मोटर्स म्हणून वापरले जाऊ शकतात.

असिंक्रोनस मोटर्स
असिंक्रोनस मोटर्स वापरली जातात इलेक्ट्रोमॅग्नेटिक इंडक्शनच्या अभिव्यक्तींपैकी एक… भौतिकशास्त्राच्या अभ्यासक्रमांमध्ये ते खालीलप्रमाणे दाखवले जाते:
तांब्याच्या डिस्कच्या खाली, जी त्याच्या मध्यभागी जाणाऱ्या उभ्या अक्षाभोवती फिरू शकते, त्याच अक्षाभोवती फिरण्यासाठी चालवलेला एक उभा घोड्याचा नाल चुंबक ठेवला जातो (डिस्क आणि चुंबकामधील यांत्रिक परस्परसंवाद वगळण्यात आला आहे). या प्रकरणात, डिस्क चुंबकाच्या त्याच दिशेने फिरू लागते, परंतु कमी वेगाने. जर तुम्ही डिस्कवरील यांत्रिक भार वाढवला (उदाहरणार्थ, थ्रस्ट बेअरिंगच्या विरूद्ध एक्सलचे घर्षण वाढवून), तर त्याची फिरण्याची गती कमी होते.
या घटनेचा भौतिक अर्थ इलेक्ट्रोमॅग्नेटिक इंडक्शनच्या सिद्धांताद्वारे सहजपणे स्पष्ट केला जातो: जेव्हा चुंबक फिरतो तेव्हा एक फिरणारे चुंबकीय क्षेत्र तयार होते, जे डिस्कमध्ये एडी प्रवाहांना प्रेरित करते, नंतरचे मोठेपणा अवलंबून असते, इतर गोष्टी समान असतात. फील्ड आणि डिस्कची सापेक्ष गती.
लेन्झच्या नियमानुसार, डिस्क फील्डच्या दिशेने फिरली पाहिजे. घर्षणाच्या अनुपस्थितीत, डिस्कने चुंबकाच्या वेगाइतका कोनीय वेग प्राप्त केला पाहिजे, ज्यानंतर प्रेरित ईएमएफ अदृश्य होईल. वास्तविक जीवनात, घर्षण अपरिहार्यपणे उपस्थित असते आणि डिस्क हळू होते.त्याची विशालता डिस्कद्वारे अनुभवलेल्या यांत्रिक ब्रेकिंग क्षणावर अवलंबून असते.
डिस्क (रोटर) च्या रोटेशनचा वेग आणि चुंबकीय क्षेत्राच्या रोटेशनचा वेग यातील तफावत मोटर्सच्या नावावर दिसून येते.
असिंक्रोनस मोटर्सच्या ऑपरेशनचे सिद्धांत:
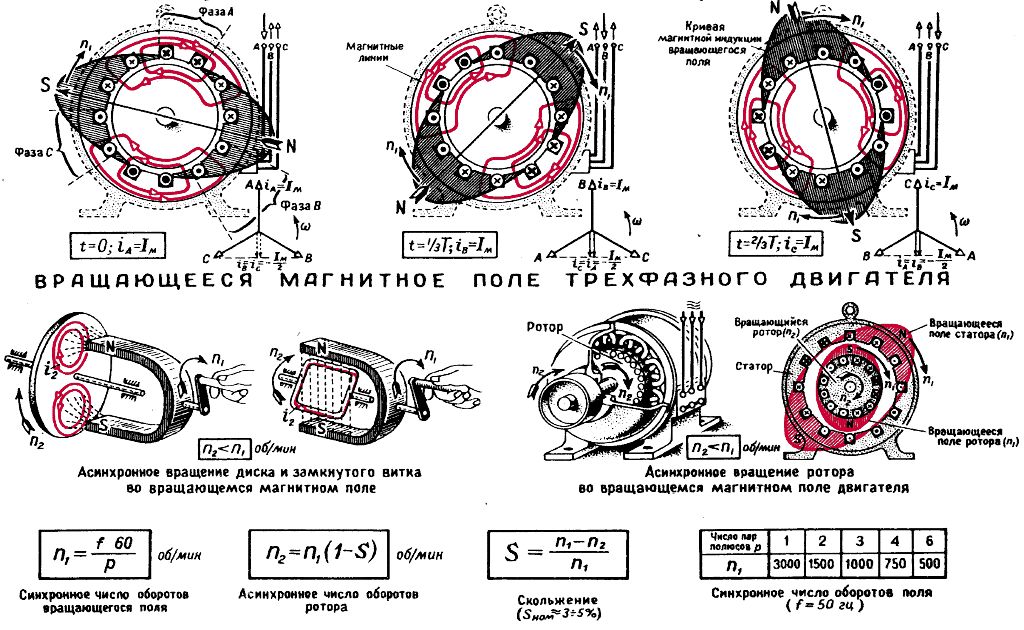
तांत्रिक असिंक्रोनस मोटर्समध्ये (बहुतेकदा तीन-टप्प्यात) फिरणारे चुंबकीय क्षेत्र तयार होते पॉलीफेस प्रवाहस्थिर स्टेटर विंडिंगभोवती वाहते. थ्री-फेज करंटच्या वारंवारतेवर आणि स्टेटर कॉइल्सची संख्या 3p फिरते फील्ड n = f / p क्रांती / सेकंद करते.

स्टेटर पोकळीमध्ये फिरता येण्याजोगा रोटर स्थित आहे. एक फिरणारी यंत्रणा त्याच्या शाफ्टशी जोडली जाऊ शकते. सर्वात सोप्या "गिलहरी सेल" मोटर्समध्ये, रोटरमध्ये स्टीलच्या दंडगोलाकार शरीराच्या खोबणीत ठेवलेल्या अनुदैर्ध्य धातूच्या रॉड्सची प्रणाली असते. तारा दोन रिंगांनी शॉर्ट सर्किट केलेल्या असतात. टॉर्क वाढवण्यासाठी, रोटरची त्रिज्या पुरेशी मोठी केली जाते.
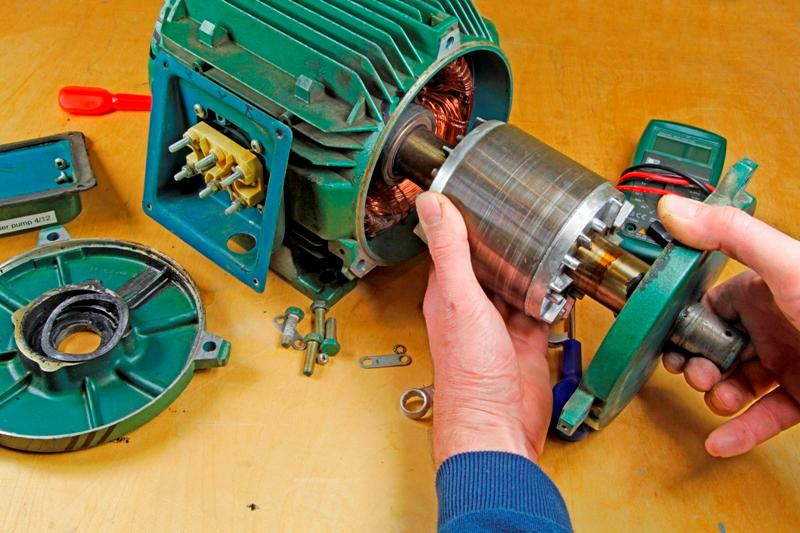
इतर मोटर डिझाइन्समध्ये (सामान्यत: उच्च पॉवर मोटर्स), रोटर वायर्स एक ओपन थ्री-फेज विंडिंग बनवतात. कॉइलचे टोक रोटरमध्येच शॉर्ट सर्किट केलेले असतात, आणि लीड्स रोटर शाफ्टवर बसवलेल्या तीन स्लिप रिंगमध्ये आणल्या जातात आणि त्यापासून वेगळ्या केल्या जातात.
थ्री-फेज रिओस्टॅट या रिंग्सना स्लाइडिंग कॉन्टॅक्ट्स (ब्रश) वापरून जोडलेले आहे, जे मोशनमध्ये मोटर सुरू करण्यास मदत करते. मोटर चालू केल्यानंतर, रिओस्टॅट पूर्णपणे काढून टाकला जातो आणि रोटर एक गिलहरी पिंजरा बनतो (पहा — जखमेच्या रोटरसह असिंक्रोनस मोटर्स).

स्टेटर हाऊसिंगवर एक टर्मिनल बोर्ड आहे. स्टेटर विंडिंग्स त्यांना बाहेर आणले जातात. त्यांचा समावेश करता येईल तारा किंवा त्रिकोण, मुख्य व्होल्टेजवर अवलंबून: पहिल्या प्रकरणात मुख्य व्होल्टेज दुसऱ्यापेक्षा 1.73 पट जास्त असू शकतो.
इंडक्शन मोटरच्या स्टेटर फील्डच्या तुलनेत रोटरच्या सापेक्ष घसरणीचे वैशिष्ट्य दर्शविणारे मूल्य म्हणतात. घसरणे… हे 100% (मोटर सुरू करण्याच्या क्षणी) वरून शून्यावर बदलते (लॉसलेस रोटर हालचालीची आदर्श स्थिती).
मोटरला पुरवठा करणार्या इलेक्ट्रिकल नेटवर्कच्या प्रत्येक दोन रेखीय कंडक्टरच्या परस्पर स्विचिंगद्वारे इंडक्शन मोटरच्या रोटेशनची दिशा उलट केली जाते.

गिलहरी पिंजरा मोटर्स उद्योगात मोठ्या प्रमाणावर वापरले जातात. असिंक्रोनस मोटर्सचे फायदे म्हणजे डिझाइनची साधेपणा आणि स्लाइडिंग संपर्कांची अनुपस्थिती.
अलीकडे पर्यंत, अशा मोटर्सचा मुख्य गैरसोय म्हणजे वेग नियमनातील अडचण, कारण यासाठी स्टेटर सर्किटचे व्होल्टेज बदलल्यास, टॉर्क झपाट्याने बदलतो, परंतु पुरवठा करंटची वारंवारता बदलणे तांत्रिकदृष्ट्या कठीण होते. आधुनिक मायक्रोप्रोसेसर उपकरणे आता मोठ्या प्रमाणावर मोटर्सच्या वेगात बदल करण्यासाठी पुरवठा प्रवाहाची वारंवारता नियंत्रित करण्यासाठी वापरली जातात - वारंवारता कन्व्हर्टर्स.
पर्यायी
अल्टरनेटर महत्त्वपूर्ण शक्ती आणि उच्च व्होल्टेजसाठी तयार केले जातात. असिंक्रोनस मशीनप्रमाणे, त्यांच्याकडे दोन विंडिंग आहेत. सामान्यतः, आर्मेचर विंडिंग स्टेटर हाऊसिंगमध्ये स्थित असते. प्राथमिक चुंबकीय प्रवाह तयार करणारे इंडक्टर रोटरवर बसवले जातात आणि ते एक्सायटरद्वारे चालवले जातात—रोटर शाफ्टवर बसवलेला एक छोटा डीसी जनरेटर. उच्च-शक्तीच्या मशीनमध्ये, उत्तेजना कधीकधी सुधारित पर्यायी व्होल्टेजद्वारे तयार केली जाते.
आर्मेचर विंडिंगच्या अस्थिरतेमुळे, उच्च शक्तींवर स्लाइडिंग संपर्कांच्या वापराशी संबंधित तांत्रिक अडचणी अदृश्य होतात.
खालील आकृती सिंगल-फेज जनरेटरची योजना दर्शवते. त्याच्या रोटरला आठ ध्रुव आहेत. यांवर रोटर शाफ्टवर बसवलेल्या स्लिप रिंग्सवर थेट करंट लागू करून बाह्य स्त्रोताकडून दिलेले जखमेच्या कॉइल्स (आकृतीमध्ये दर्शविलेले नाहीत) आहेत. पोल कॉइल्स अशा प्रकारे जखमेच्या आहेत की स्टेटरला तोंड देत असलेल्या खांबाची चिन्हे पर्यायी आहेत. खांबांची संख्या समान असणे आवश्यक आहे.
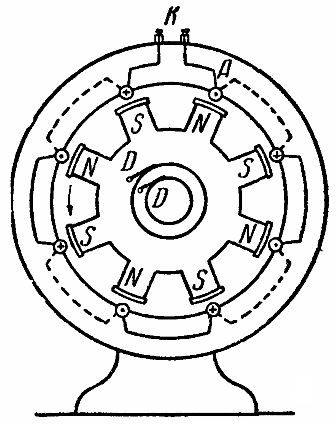
आर्मेचर विंडिंग स्टेटर हाऊसिंगमध्ये स्थित आहे. ड्रॉईंगच्या समतलाला लंब असलेल्या त्याच्या लांब कार्यरत "सक्रिय" तारा वर्तुळांसह आकृतीमध्ये दर्शविल्या जातात, जेव्हा रोटर फिरते तेव्हा ते चुंबकीय इंडक्शनच्या रेषा ओलांडतात.
वर्तुळे प्रेरित विद्युत क्षेत्रांच्या दिशांचे तात्कालिक वितरण दर्शवतात. स्टेटरच्या पुढच्या बाजूने चालू असलेल्या कनेक्टिंग वायर्स घन रेषांसह आणि मागील बाजूस डॅश केलेल्या रेषांसह दर्शविल्या जातात. के क्लॅम्प्सचा वापर स्टेटर विंडिंगला बाह्य सर्किट जोडण्यासाठी केला जातो. रोटरच्या रोटेशनची दिशा बाणाने दर्शविली जाते.
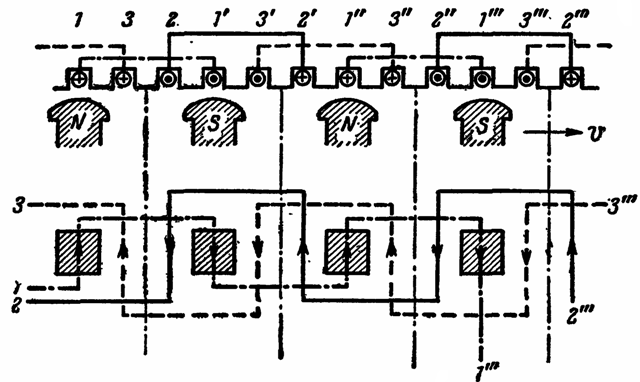
जर तुम्ही क्लॅम्प्स K च्या दरम्यान जाणार्या त्रिज्येच्या बाजूने मशीनला मानसिकरित्या कट केले आणि ते विमानात बदलले, तर स्टेटर विंडिंग आणि रोटर पोलची सापेक्ष स्थिती (बाजू आणि योजना) योजनाबद्ध रेखाचित्राने दर्शविली जाईल:
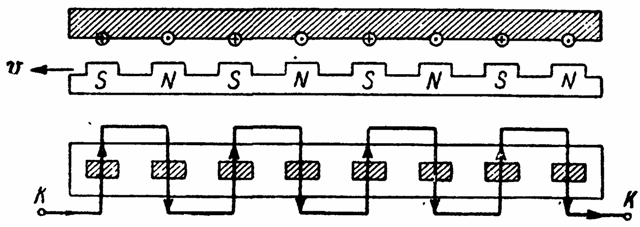
आकृतीचा विचार करून, आम्ही खात्री करतो की सर्व सक्रिय वायर्स (इंडक्टरच्या ध्रुवांमधून जाणारे) एकमेकांशी मालिकेत जोडलेले आहेत आणि त्यांच्यामध्ये प्रेरित EMF बेरीज केले आहे. सर्व EMF चे टप्पे स्पष्टपणे समान आहेत.रोटरच्या एका संपूर्ण रोटेशन दरम्यान, प्रत्येक वायरमध्ये (आणि म्हणून बाह्य सर्किटमध्ये) वर्तमान बदलाचे चार पूर्ण कालावधी प्राप्त होतील.
जर एखाद्या इलेक्ट्रिकल मशीनमध्ये p ध्रुवांच्या जोड्या असतील आणि रोटर प्रति सेकंद n क्रांती करत फिरत असेल, तर मशीनला प्राप्त होणाऱ्या पर्यायी प्रवाहाची वारंवारता f = pn hz आहे.
नेटवर्कमधील ईएमएफची वारंवारता स्थिर असणे आवश्यक असल्याने, रोटर्सच्या रोटेशनची गती स्थिर असणे आवश्यक आहे. तांत्रिक वारंवारता (50 Hz) चा EMF प्राप्त करण्यासाठी, रोटरच्या खांबांची संख्या पुरेशी मोठी असल्यास तुलनेने मंद रोटेशन वापरले जाऊ शकते.
थ्री-फेज करंट प्राप्त करण्यासाठी, स्टेटर बॉडीमध्ये तीन स्वतंत्र विंडिंग्स ठेवल्या जातात. त्यातील प्रत्येक इंडक्टर्सच्या समीप (विरुद्ध) ध्रुवांमधील चाप अंतराच्या एक तृतीयांश अंतराने इतर दोनच्या तुलनेत ऑफसेट आहे.
हे सत्यापित करणे सोपे आहे की जेव्हा इंडक्टर्स फिरतात तेव्हा फेजमध्ये (वेळेत) 120 ° ने शिफ्ट केलेल्या कॉइलमध्ये EMFs प्रेरित होतात. कॉइल्सचे टोक मशीनमधून काढले जातात आणि तारा किंवा डेल्टामध्ये जोडले जाऊ शकतात.
जनरेटरमध्ये, फील्ड आणि कंडक्टरची सापेक्ष गती रोटरचा व्यास, प्रति सेकंद रोटरच्या क्रांतीची संख्या आणि ध्रुव जोड्यांच्या संख्येद्वारे निर्धारित केली जाते.

जर जनरेटर पाण्याच्या प्रवाहाने (हायड्रोजनरेटर) चालवला असेल, तर तो सहसा मंद गतीने बनविला जातो. इच्छित वर्तमान वारंवारता प्राप्त करण्यासाठी, ध्रुवांची संख्या वाढवणे आवश्यक आहे, ज्यामुळे रोटरच्या व्यासात वाढ करणे आवश्यक आहे.
अनेक तांत्रिक कारणांमुळे शक्तिशाली हायड्रोजन जनरेटर त्यांच्याकडे सहसा उभ्या शाफ्ट असतात आणि ते हायड्रॉलिक टर्बाइनच्या वर स्थित असतात, ज्यामुळे ते फिरतात.

स्टीम टर्बाइन चालित जनरेटर - टर्बाइन जनरेटर सहसा उच्च गती असतात. यांत्रिक शक्ती कमी करण्यासाठी, त्यांच्याकडे लहान व्यास आणि ध्रुवांची संख्या कमी आहे. अनेक तांत्रिक बाबींसाठी क्षैतिज शाफ्टसह टर्बाइन जनरेटरचे उत्पादन आवश्यक आहे.
जर जनरेटर अंतर्गत ज्वलन इंजिनद्वारे चालविले जात असेल, तर त्याला डिझेल जनरेटर म्हणतात, कारण डिझेल इंजिन सामान्यतः स्वस्त इंधन वापरणारे इंजिन म्हणून वापरले जातात.

जनरेटर रिव्हर्सिबिलिटी, सिंक्रोनस मोटर्स
जर बाह्य स्त्रोताकडून जनरेटरच्या स्टेटर विंडिंगवर पर्यायी व्होल्टेज लागू केले गेले, तर स्टेटरमध्ये निर्माण होणाऱ्या विद्युत् प्रवाहाच्या चुंबकीय क्षेत्रासह इंडक्टरच्या ध्रुवांचा परस्परसंवाद होईल आणि त्याच दिशेने टॉर्क्स कार्य करतील. सर्व खांबांवर.
जर रोटर अशा वेगाने फिरला की अल्टरनेटिंग करंटच्या अर्ध्या कालावधीनंतर, इंडक्टरचा पुढचा पोल (पहिल्या ध्रुवाच्या विरुद्ध चिन्हात) स्टेटर विंडिंगच्या मानल्या गेलेल्या वायरच्या खाली फिट होईल, तर त्याचे चिन्ह ते आणि करंट यांच्यातील परस्परसंवाद शक्ती, ज्याने त्याची दिशा बदलली आहे, तीच राहील.
या परिस्थितीत, रोटर, टॉर्कच्या सतत प्रभावाखाली राहून, सतत हलत राहील आणि कोणतीही यंत्रणा चालविण्यास सक्षम असेल. रोटरच्या हालचालींच्या प्रतिकारावर मात करणे नेटवर्कद्वारे वापरल्या जाणार्या ऊर्जेमुळे होईल आणि जनरेटर इलेक्ट्रिक मोटर होईल.

तथापि, हे लक्षात घेतले पाहिजे की सतत हालचाल केवळ रोटेशनच्या काटेकोरपणे परिभाषित वेगाने शक्य आहे, कारण त्यातून विचलन झाल्यास एक प्रवेगक क्षण रोटरच्या प्रत्येक ध्रुवावर अंशतः कार्य करेल आणि रोटरच्या दोन कंडक्टरमध्ये फिरेल. स्टेटर, वेळेचा भाग - थांबणे.
अशा प्रकारे, मोटरच्या फिरण्याचा वेग काटेकोरपणे निर्धारित करणे आवश्यक आहे, - ज्या कालावधीत खांबाची जागा पुढील ध्रुवाने बदलली आहे ती विद्युत् प्रवाहाच्या अर्ध्या कालावधीशी जुळली पाहिजे, म्हणूनच अशा मोटर्स म्हणतात. समकालिकपणे.
स्थिर रोटरच्या सहाय्याने स्टेटरच्या वळणावर पर्यायी व्होल्टेज लागू केल्यास, वर्तमानाच्या पहिल्या अर्ध्या चक्रादरम्यान रोटरच्या सर्व ध्रुवांना समान चिन्हाच्या टॉर्कची क्रिया जाणवत असली तरीही, जडत्वामुळे, रोटरला हलवायला वेळ मिळणार नाही. पुढील अर्ध-चक्रात, सर्व रोटर खांबांसाठी टॉर्क्सचे चिन्ह उलट बदलेल.
परिणामी, रोटर कंपन करेल परंतु फिरण्यास सक्षम होणार नाही. म्हणून, सिंक्रोनस मोटरला प्रथम जखमा करणे आवश्यक आहे, म्हणजेच, क्रांतीच्या सामान्य संख्येवर आणले पाहिजे आणि त्यानंतरच स्टेटर विंडिंगमधील विद्युत प्रवाह चालू केला पाहिजे.
सिंक्रोनस मोटर्सचा विकास यांत्रिक पद्धतींनी (कमी शक्तीवर) आणि विशेष विद्युत उपकरणे (उच्च शक्तींवर) केला जातो.
लहान लोड बदलांसाठी, नवीन लोडशी जुळवून घेण्यासाठी मोटर गती आपोआप बदलेल. तर, मोटर शाफ्टवरील भार जसजसा वाढतो, रोटर त्वरित मंद होतो. म्हणून, स्टेटर विंडिंगमधील इंडक्टरद्वारे प्रेरित लाइन व्होल्टेज आणि विरुद्ध प्रेरित ईएमएफमधील फेज शिफ्ट बदलते.
याव्यतिरिक्त, आर्मेचर प्रतिक्रिया इंडक्टर्सचे डिमॅग्नेटाइझेशन तयार करते, त्यामुळे स्टेटर करंट वाढते, इंडक्टर्सला वाढीव टॉर्कचा अनुभव येतो आणि वाढलेल्या लोडवर मात करून मोटर पुन्हा समकालिकपणे फिरू लागते. समान प्रक्रिया लोड कमी सह उद्भवते.
लोडमध्ये तीक्ष्ण चढउतारांसह, मोटरची ही अनुकूलता अपुरी असू शकते, त्याची गती लक्षणीय बदलेल, ती "सिंक्रोनिझममधून बाहेर पडेल" आणि अखेरीस थांबेल, तर स्टेटरमध्ये प्रेरित ईएमएफ अदृश्य होईल आणि त्यातील प्रवाह वाढेल. तीव्रपणे म्हणून, लोडमध्ये तीव्र चढउतार टाळले पाहिजेत. मोटार थांबवण्यासाठी, स्पष्टपणे, आपण प्रथम स्टेटर सर्किट डिस्कनेक्ट करणे आवश्यक आहे आणि नंतर चोक्स डिस्कनेक्ट करणे आवश्यक आहे; इंजिन सुरू करताना, आपण ऑपरेशनच्या उलट क्रमाचे पालन केले पाहिजे.
सिंक्रोनस मोटर्स बहुतेकदा स्थिर गतीने कार्यरत असलेल्या यंत्रणा चालविण्यासाठी वापरल्या जातात. सिंक्रोनस मोटर्सचे फायदे आणि तोटे आणि ते सुरू करण्याच्या पद्धती येथे आहेत: सिंक्रोनस मोटर्स आणि त्यांचे अनुप्रयोग
शैक्षणिक फिल्म स्ट्रिप - "सिंक्रोनस मोटर्स", 1966 मध्ये शैक्षणिक-व्हिज्युअल एड्स कारखान्याने तयार केली. तुम्ही ते येथे पाहू शकता: फिल्मस्ट्रिप «सिंक्रोनस मोटर»
