इलेक्ट्रोमॅग्नेटिक रिलेची मूलभूत मापदंड आणि वैशिष्ट्ये
 रिले नियंत्रण कायदा लागू करणाऱ्या विद्युत उपकरणाला रिले म्हणतात... रिलेमध्ये, जेव्हा नियंत्रण (इनपुट) पॅरामीटर एका विशिष्ट सेट मूल्यामध्ये सहजतेने बदलले जाते, तेव्हा नियंत्रित (आउटपुट) पॅरामीटर अचानक बदलतो. तसेच, यापैकी किमान एक पॅरामीटर विद्युतीय असणे आवश्यक आहे.
रिले नियंत्रण कायदा लागू करणाऱ्या विद्युत उपकरणाला रिले म्हणतात... रिलेमध्ये, जेव्हा नियंत्रण (इनपुट) पॅरामीटर एका विशिष्ट सेट मूल्यामध्ये सहजतेने बदलले जाते, तेव्हा नियंत्रित (आउटपुट) पॅरामीटर अचानक बदलतो. तसेच, यापैकी किमान एक पॅरामीटर विद्युतीय असणे आवश्यक आहे.
कार्यात्मक अवयवांची क्रिया इलेक्ट्रोमॅग्नेटिक रिले अंजीरमधील आकृतीनुसार शोधले जाऊ शकते. 1. रिसीव्हिंग बॉडी A हे इनपुट व्हॅल्यू (व्होल्टेज) मॅग्नेटिक सर्किट 1 च्या कॉइल 2 ला पुरवलेल्या Uin ला इंटरमीडिएट व्हॅल्यूमध्ये रूपांतरित करते, उदा. अँकरच्या यांत्रिक शक्तीमध्ये 3. अँकर FЯ चे यांत्रिक बल कार्यकारी मंडळ B च्या संपर्क प्रणालीवर कार्य करते. मध्यवर्ती मूल्य — अँकर FЯ चे बल, इनपुट मूल्य Uin च्या प्रमाणात असते, त्याची तुलना मध्यवर्ती भाग B च्या स्प्रिंग 9 ने विकसित केलेल्या Fpr बलाचे दिलेले मूल्य. जेव्हा Uin <Uav, Fya
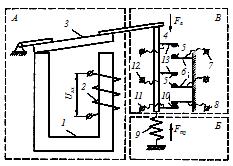 तांदूळ. 1 इलेक्ट्रोमॅग्नेटिक रिलेची योजना
तांदूळ. 1 इलेक्ट्रोमॅग्नेटिक रिलेची योजना
ऑपरेशनच्या प्रक्रियेत, टाइम स्केलवरील इलेक्ट्रोमॅग्नेटिक रिले चार टप्पे वेगळे करते: अॅक्ट्युएशन टॅव्हचा कालावधी (वेळ), कामाचा कालावधी टूर्क, शटडाउन टॉफचा कालावधी (वेळ), विश्रांतीचा कालावधी (वेळ) . 2).
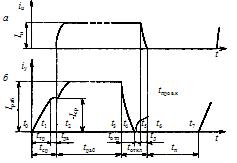
तांदूळ. 2. वेळेवर आउटपुट (a) आणि आउटपुट (b) च्या प्रमाणांचे अवलंबन
इलेक्ट्रोमॅग्नेटिक रिलेचा अॅक्ट्युएशन कालावधी
 प्रतिसाद कालावधीमध्ये इनपुट सिग्नलचा मॉनिटरिंग बॉडीवर परिणाम होण्याच्या क्षणापासून नियंत्रित सर्किटमध्ये सिग्नल दिसेपर्यंतचा कालावधी समाविष्ट असतो. abscissa axis tav = t2 –t0 चा विभाग अंजीरमधील या कालावधीशी संबंधित आहे. 2, बी. या क्षणी t0 रिले कॉइलमधील विद्युत् प्रवाह अशा मूल्यापर्यंत वाढतो ज्यावर आर्मेचरवर कार्य करणारे इलेक्ट्रोमॅग्नेटिक फोर्स Fe इंटरमीडिएट बॉडीच्या स्प्रिंग फोर्स Fm (यांत्रिक बल) ला विरोध करू लागते. त्यानंतर इनपुट मूल्याला स्वीकृती मूल्य म्हणतात.
प्रतिसाद कालावधीमध्ये इनपुट सिग्नलचा मॉनिटरिंग बॉडीवर परिणाम होण्याच्या क्षणापासून नियंत्रित सर्किटमध्ये सिग्नल दिसेपर्यंतचा कालावधी समाविष्ट असतो. abscissa axis tav = t2 –t0 चा विभाग अंजीरमधील या कालावधीशी संबंधित आहे. 2, बी. या क्षणी t0 रिले कॉइलमधील विद्युत् प्रवाह अशा मूल्यापर्यंत वाढतो ज्यावर आर्मेचरवर कार्य करणारे इलेक्ट्रोमॅग्नेटिक फोर्स Fe इंटरमीडिएट बॉडीच्या स्प्रिंग फोर्स Fm (यांत्रिक बल) ला विरोध करू लागते. त्यानंतर इनपुट मूल्याला स्वीकृती मूल्य म्हणतात.
प्रारंभिक कालावधी ttr = t1 — t0 या विभागाशी संबंधित आहे. T1 च्या वेळी, रिले इलेक्ट्रोमॅग्नेटचे आर्मेचर हलू लागते. tdv = t2 — t1 दरम्यान, अँकर हलतो, मध्यवर्ती शरीर B च्या प्रतिकारावर मात करतो (चित्र 1 पहा) आणि कार्यकारी मंडळ C सक्रिय करतो.
आर्मेचर स्ट्रोकच्या शेवटी, ड्राइव्ह संपर्क बंद होतात, (चित्र 2, अ) मधील लोड प्रवाह शून्य ते समतोल मूल्यापर्यंत वाढू लागतो. इनपुट मूल्य ज्यावर आउटपुट सर्किटचे नियंत्रण सुरू होते त्याला स्वीकृती मूल्य (Iav) म्हणतात. Isr शी संबंधित Psr शक्तीला क्रियाशील शक्ती म्हणतात.
प्रतिसाद वेळ t cf = ttr + tdv.
इलेक्ट्रोमॅग्नेटिक रिलेचा प्रतिसाद वेळ 1-2 ते 20 ms पर्यंत बदलतो. इलेक्ट्रोमॅग्नेटिक टाइम रिले 10 सेकंदांपर्यंत विलंब प्रदान करतात.
रिलेच्या प्रतिसादाच्या वेळेचा अंदाज लावण्यासाठी, अभिव्यक्ती वापरण्याची परवानगी आहे
t cf = t1kz-bm –a,
जेथे t1 हा दिलेल्या सुरक्षा घटक ks आणि घटक m = 1 साठी प्रतिसाद वेळ आहे; a, b — गुणांक जे रिलेच्या प्रकारावर आणि kz आणि m च्या मूल्यांवर अवलंबून निर्धारित केले जातात.
kz = 1.5¸2 वर हाय-स्पीड रिलेसाठी, गुणांक a चे मूल्य एकतेकडे जाते. k z = 1.5¸3 सह सामान्य रिलेसाठी, मूल्य a = 0.25¸0.95, गुणांक b चे मूल्य सामान्यतः 1.4-1.6 श्रेणीमध्ये असते.
इलेक्ट्रोमॅग्नेटिक रिलेचा ऑपरेटिंग कालावधी
 कामकाजाच्या कालावधीमध्ये वेळ मध्यांतर twork = t3 — t2 समाविष्ट आहे, म्हणजे. आउटपुट सर्किट टी 2 च्या नियंत्रणाच्या क्षणापासून ते इनपुट सिग्नल टी 3 च्या संवेदनशील अवयवावरील प्रभाव संपुष्टात येण्याच्या क्षणापर्यंतचा काळ. विद्युत प्रवाह आयवर्कच्या स्थिर मूल्यापर्यंत वाढू लागतो (चित्र 2, ब) — हे इनपुट मूल्याचे कार्यरत मूल्य आहे, जे रिलेचे विश्वसनीय ऑपरेशन सुनिश्चित करते.
कामकाजाच्या कालावधीमध्ये वेळ मध्यांतर twork = t3 — t2 समाविष्ट आहे, म्हणजे. आउटपुट सर्किट टी 2 च्या नियंत्रणाच्या क्षणापासून ते इनपुट सिग्नल टी 3 च्या संवेदनशील अवयवावरील प्रभाव संपुष्टात येण्याच्या क्षणापर्यंतचा काळ. विद्युत प्रवाह आयवर्कच्या स्थिर मूल्यापर्यंत वाढू लागतो (चित्र 2, ब) — हे इनपुट मूल्याचे कार्यरत मूल्य आहे, जे रिलेचे विश्वसनीय ऑपरेशन सुनिश्चित करते.
Iwork / Icr = kz या गुणोत्तराला कामाच्या ठिकाणी सुरक्षिततेचा घटक म्हणतात.
रिलेच्या संवेदनशील घटकाची ओव्हरलोड क्षमता वैशिष्ट्यीकृत करण्यासाठी, इनपुट प्रमाणाचे मूल्य वापरले जाते, ज्याला ऑपरेटिंग प्रमाण Ioperating.max चे मर्यादा मूल्य म्हणतात.
कार्यरत मूल्याची मर्यादा - हे त्याचे मूल्य आहे जे संवेदनशील अवयव थोड्या सामान्य कालावधीसाठी सहन करू शकते. तथापि, विद्युत किंवा यांत्रिक शक्ती किंवा हीटिंगच्या स्थितीमुळे रिले सामान्य मोडमध्ये कार्यरत असताना या मूल्याचे मूल्य अस्वीकार्य आहे.
कंट्रोल पॉवर संकल्पना Ru चा वापर रिले ड्राइव्हच्या भार वहन क्षमतेचे वैशिष्ट्य करण्यासाठी केला जातो. कंट्रोल पॉवर ही नियंत्रित सर्किटमधील शक्ती आहे जी ड्राइव्ह बर्याच काळासाठी प्रसारित करू शकते.
इलेक्ट्रोमॅग्नेटिक रिले ट्रिप कालावधी
 ऑफ पीरियडमध्ये टाइम इंटरव्हल टॉफ = t6 — t3 असतो, म्हणजे टी 3 चे अनुभव घेणा-या अवयवावर होणारा प्रभाव बंद होण्याच्या क्षणापासून नियंत्रित सर्किटमधील विद्युतप्रवाह शून्यापर्यंत कमी होण्याच्या क्षणापर्यंतचा काळ (चित्र 16, अ).
ऑफ पीरियडमध्ये टाइम इंटरव्हल टॉफ = t6 — t3 असतो, म्हणजे टी 3 चे अनुभव घेणा-या अवयवावर होणारा प्रभाव बंद होण्याच्या क्षणापासून नियंत्रित सर्किटमधील विद्युतप्रवाह शून्यापर्यंत कमी होण्याच्या क्षणापर्यंतचा काळ (चित्र 16, अ).
ऑफ पीरियडमध्ये रिलीझ कालावधी totp = t4 — t3 समाविष्ट आहे ज्यामध्ये रिले बंद आहे. रिले कॉइलमधील वर्तमान iy शून्यावर घसरते (Fig. 2, b). या कालावधीत, विरोधी स्प्रिंग फोर्स (यांत्रिक बल) इलेक्ट्रोमॅग्नेटिक फोर्सपेक्षा जास्त आहे, म्हणजे. Fm> Fe आणि आर्मेचर सोडले जाते.
संपर्क अयशस्वी (इंटरव्हल tc = t5 — t4) निवडल्यानंतर, रिले संपर्क उघडतात आणि त्यांच्या दरम्यान एक चाप प्रज्वलित केला जातो, जो वेळ td = t6 — t5 नंतर विझतो. td कालावधीत, नियंत्रित सर्किटमधील विद्युत् प्रवाह In वरून शून्यापर्यंत कमी होतो (चित्र 2, a).
बंद वेळ t t = tp + tc + td.
ट्रिपिंग कालावधी पुनर्प्राप्ती घटकाद्वारे दर्शविला जातो, जो ड्रॉप करंट Iotp आणि पिकअप चालू Iav चे गुणोत्तर आहे: kv = Iotp / Icr.
सामान्यतः, पॉवर सिस्टम प्रोटेक्शन रिले आणि कंट्रोल रिलेसाठी जे इनपुट पॅरामीटर अरुंद मर्यादेत नियंत्रित करतात, kv एकतेच्या जवळ असावे.
इलेक्ट्रोमॅग्नेटिक रिलेचा विश्रांतीचा कालावधी
उर्वरित कालावधी म्हणजे वेळ मध्यांतर tp = t7 — t6.
लेटन्सी कालावधी हे इनऑपरेटिव्ह व्हॅल्यू नावाच्या पॅरामीटरद्वारे दर्शविले जाते, जे रिले ऑपरेट होत नाही किंवा ठेवली जात नाही याची खात्री करणारे इनपुट प्रमाणाचे सर्वात मोठे मूल्य आहे. शटडाउन वेळ ऑपरेटिंग स्टार्ट-अप वेळेपेक्षा आणि प्रकाशन वेळेपेक्षा कमी आहे.
नियंत्रण शक्ती आणि क्रियाशक्तीच्या गुणोत्तराला लाभ म्हणतात, ku = Py/Pcr.
प्रति युनिट वेळेच्या प्रारंभांची संख्या सायकलच्या वेळेच्या व्यस्त प्रमाणात असलेल्या मूल्याद्वारे निर्धारित केली जाते:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
लकोटा ओ.बी.