इलेक्ट्रोमॅग्नेटिक ब्रेकिंग उपकरणे
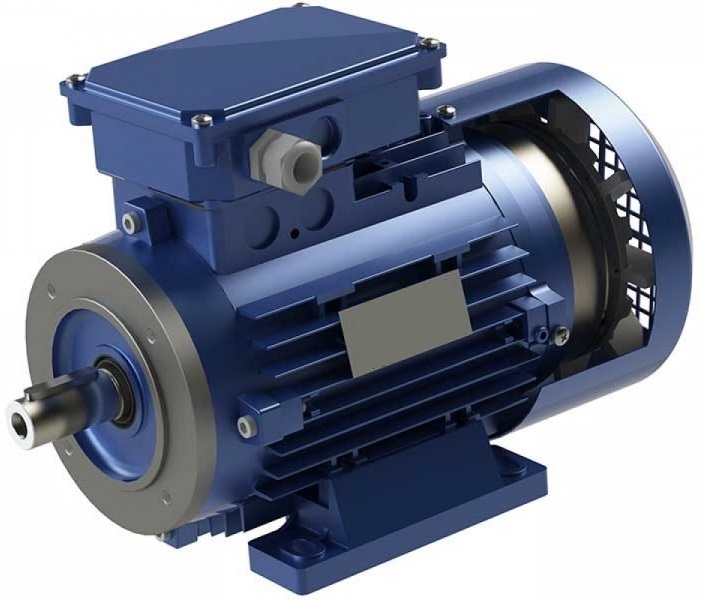
काही उपकरणांमध्ये, इलेक्ट्रिक मोटरवरील इलेक्ट्रोमॅग्नेटिक डिस्क ब्रेकचा वापर मशीनचे फिरणारे घटक थांबवण्यासाठी केला जातो. इलेक्ट्रोमॅग्नेटिक ब्रेकिंग डिव्हाइस थेट मोटरमध्ये किंवा मोटरवर माउंट केले जाते आणि मूलत: एक सहायक मोटर किंवा ड्राइव्ह युनिट आहे जे डिव्हाइसच्या स्थितीनुसार आणि त्याच्या सुरक्षित ऑपरेशनच्या दृष्टीने सर्व आवश्यकता पूर्ण करते. हे स्प्रिंगसह लागू केले जाते आणि सोडले जाते इलेक्ट्रोमॅग्नेटसह.
हे सोल्यूशन केवळ अपघात झाल्यास इंजिनचा सुरक्षित थांबा सुनिश्चित करण्यास किंवा त्याच्या ऑपरेशन दरम्यान मशीनच्या कार्यकारी घटकाची स्थिती सुनिश्चित करण्यास अनुमती देत नाही, परंतु मशीनच्या थांबा दरम्यान ऑपरेशनचा वेळ देखील कमी करते.
इलेक्ट्रोमॅग्नेटिक डिस्क ब्रेकचे दोन प्रकार आहेत: AC डिस्क ब्रेक आणि DC डिस्क ब्रेक (ब्रेकला शक्ती देणार्या करंटच्या स्वरूपावर अवलंबून). ब्रेकच्या DC आवृत्तीसाठी, मोटरला एक रेक्टिफायर देखील पुरवला जातो, ज्याद्वारे AC कडून डीसी मिळवला जातो जो मोटरला स्वतःच शक्ती देतो.
ब्रेकिंग डिव्हाइसच्या डिझाइनमध्ये हे समाविष्ट आहे: इलेक्ट्रोमॅग्नेट, आर्मेचर आणि डिस्क. इलेक्ट्रोमॅग्नेट एका विशेष प्रकरणात स्थित कॉइलच्या संचाच्या स्वरूपात बनविला जातो. आर्मेचर ब्रेकिंग यंत्रणा म्हणून काम करते आणि एक घर्षण विरोधी पृष्ठभाग आहे जो ब्रेक डिस्कशी संवाद साधतो.
डिस्क स्वतः, त्यावर लागू केलेल्या घर्षण सामग्रीसह, मोटर शाफ्टवर स्लीव्हच्या दातांच्या बाजूने फिरते. जेव्हा ब्रेक कॉइल्सवर व्होल्टेज लागू केले जाते, तेव्हा आर्मेचर खेचले जाते आणि मोटर शाफ्ट ब्रेक डिस्कसह मुक्तपणे फिरू शकते.
जेव्हा स्प्रिंग्स आर्मेचर दाबतात तेव्हा ब्रेकिंग मुक्त स्थितीत प्रदान केले जाते आणि ते ब्रेक डिस्कवर कार्य करते, ज्यामुळे शाफ्ट थांबते.
या प्रकारचे ब्रेक इलेक्ट्रिक ड्राइव्ह सिस्टममध्ये मोठ्या प्रमाणावर वापरले जातात. ब्रेकिंग यंत्रास आपत्कालीन पॉवर अयशस्वी झाल्यास, ब्रेक मॅन्युअली सोडणे शक्य होऊ शकते.
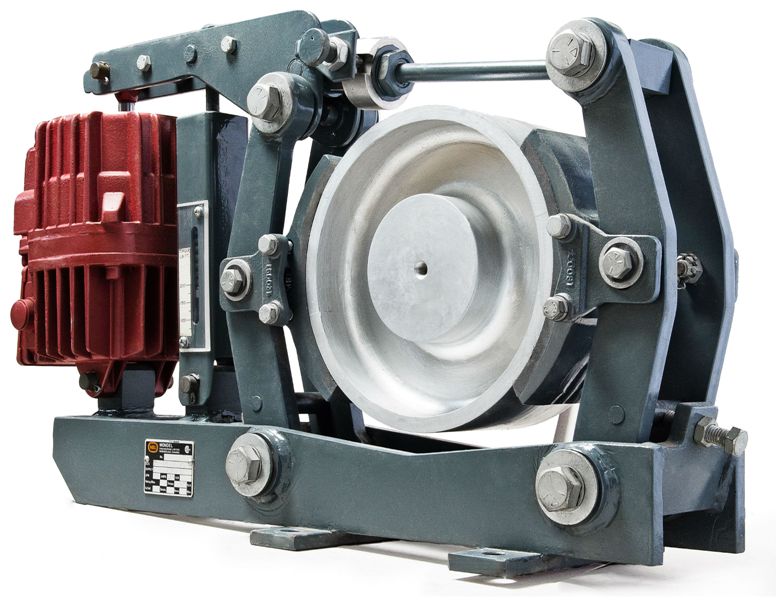
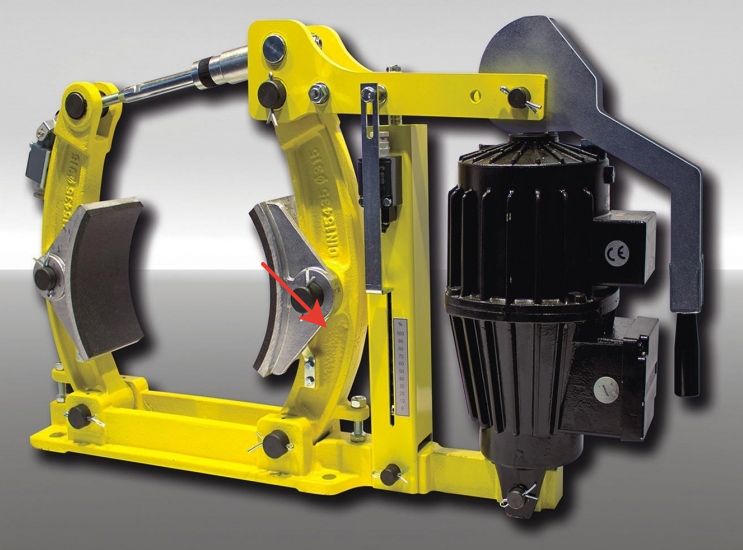
मशीन बंद असताना शाफ्टला ब्रेक केलेल्या स्थितीत ठेवण्यासाठी हॉईस्ट इलेक्ट्रोमॅग्नेटिक शू ब्रेक (TKG) वापरतात.
TKP — MP मालिका DC ब्रेक. टीकेजी - इलेक्ट्रो-हायड्रॉलिक टॅपेट ब्रेक, टीई मालिका. टीकेजी ब्रेक सोलेनॉइडमध्ये ड्राईव्ह आणि मेकॅनिकल भाग समाविष्ट आहे, ज्यामध्ये पुढील गोष्टींचा समावेश आहे: एक स्टँड, स्प्रिंग्स, लीव्हर सिस्टम आणि ब्रेक पॅड.
ब्रेक युनिटला क्षैतिज स्थितीत ब्रेक डिस्कसह अनुलंब माउंट केले जाते. AC किंवा DC समर्थित ब्रेकिंग उपकरणांचे यांत्रिक भाग समान व्यासाच्या रोलर्ससाठी समान असतात.
सहसा, अशा डिव्हाइसेसमध्ये अक्षर पदनाम TK आणि ब्रेक रोलरचा व्यास दर्शविणारी संख्या असते. पॉवर चालू केल्यावर, लीव्हर स्प्रिंग्सची क्रिया तटस्थ करतात आणि मुक्त रोटेशनसाठी पुली सोडतात.

इलेक्ट्रोमॅग्नेटिक ब्रेक वापरले जातात:
-
क्रेन, लिफ्ट, लेइंग मशीन इ. ब्लॉक करणे. बंद स्थितीत; कन्व्हेयर, वळण आणि विणकाम मशीन, वाल्व्ह, मोबाइल उपकरणे इत्यादी थांबविण्याच्या यंत्रणेमध्ये;
-
मशीनचा डाउनटाइम (शटडाउन दरम्यान डाउनटाइम) कमी करण्यासाठी;
-
एस्केलेटर, आंदोलक इ. इत्यादींसाठी आपत्कालीन स्टॉप सिस्टममध्ये;
-
वेळेच्या विशिष्ट बिंदूवर अचूक स्थान निश्चित करणे थांबवणे.
ड्रिलिंग प्लॅटफॉर्ममध्ये, इंडक्शन ब्रेकिंगचा वापर केला जातो, इंडक्टरच्या चुंबकीय क्षेत्रांच्या परस्परसंवादावर आधारित, ज्या भूमिकेत इलेक्ट्रोमॅग्नेट कार्य करते आणि आर्मेचर, ज्याच्या कॉइलमध्ये प्रवाह प्रेरित होतात, ज्याचे चुंबकीय क्षेत्र मंद होते. "त्यांना कारणीभूत कारण" (पहा लेन्झचा कायदा), अशा प्रकारे रोटरसाठी आवश्यक ब्रेकिंग टॉर्क तयार करते.

आकृतीमध्ये ही घटना पाहू. जेव्हा स्टेटर विंडिंगमध्ये विद्युत प्रवाह चालू केला जातो, तेव्हा त्याचे चुंबकीय क्षेत्र रोटरमध्ये एडी करंट प्रवृत्त करते. रोटरमधील एडी करंट अँपिअरच्या शक्तीने प्रभावित होतो, ज्याचा क्षण या प्रकरणात मंद होतो.
तुम्हाला माहिती आहेच, अल्टरनेटिंग करंटसह असिंक्रोनस आणि सिंक्रोनस मशीन, तसेच डायरेक्ट करंट असलेली मशीन, जेव्हा शाफ्ट स्टेटरच्या सापेक्ष हलतो तेव्हा ब्रेकिंग मोडमध्ये कार्य करू शकतात. जर शाफ्ट स्थिर असेल (सापेक्ष गती नसेल), तर ब्रेकिंगचा कोणताही प्रभाव होणार नाही.
अशाप्रकारे, मोटार-आधारित ब्रेकचा वापर शाफ्टला विश्रांतीवर ठेवण्याऐवजी ते थांबविण्यासाठी केला जातो. त्याच वेळी, अशा प्रकरणांमध्ये यंत्रणेच्या हालचालीच्या मंदतेची तीव्रता सहजतेने समायोजित केली जाऊ शकते, जे कधीकधी सोयीस्कर असते.
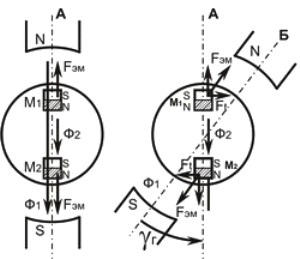
खालील आकृती हिस्टेरेसिस ब्रेकचे ऑपरेशन दर्शवते.जेव्हा स्टेटर विंडिंगला विद्युत प्रवाह पुरवठा केला जातो, तेव्हा टॉर्क रोटरवर कार्य करतो, या प्रकरणात तो थांबतो आणि एका मोनोलिथिक रोटरच्या चुंबकीकरणाच्या उलट्यामुळे हिस्टेरेसिसच्या घटनेमुळे येथे होतो.
भौतिक कारण म्हणजे रोटरचे चुंबकीकरण असे होते की त्याचा चुंबकीय प्रवाह स्टेटर फ्लक्सच्या दिशेने एकरूप होतो. आणि जर तुम्ही या स्थितीतून रोटर फिरवण्याचा प्रयत्न केला (जेणेकरून स्टेटर रोटरच्या सापेक्ष B स्थितीत असेल), चुंबकीय शक्तींच्या स्पर्शिक घटकांमुळे ते A स्थितीत परत येण्याचा प्रयत्न करेल- आणि अशा प्रकारे ब्रेकिंग होते. या प्रकरणात.