कार्यक्षमता आणि शक्तीवर इलेक्ट्रिक मोटर लोडचा प्रभाव
सर्वसाधारणपणे पॉवर रिझर्व्ह किंवा इलेक्ट्रिक मोटर कमी लोड केल्याने कार्यक्षमता आणि शक्ती कमी होते. नेटवर्कमधून इलेक्ट्रिक मोटरद्वारे वापरल्या जाणार्या सक्रिय आणि प्रतिक्रियाशील उर्जेची मूल्ये निश्चित करण्यासाठी कधीकधी या गुणांकांची वास्तविक मूल्ये जाणून घेणे आवश्यक असते.
नाममात्र पेक्षा कमी लोडवर इलेक्ट्रिक मोटर्सची कार्यक्षमता सूत्राद्वारे निर्धारित केली जाऊ शकते:
जेथे ηnom ही इलेक्ट्रिक मोटरची नाममात्र कार्यक्षमता आहे.
β निर्धारित करण्यासाठी, सूत्र वापरा:

जेथे Kz हे वास्तविक लोडचे नाममात्र (लोड फॅक्टर) चे गुणोत्तर आहे;
α — गुणांक बरोबर गृहीत धरले:
• मालिका उत्तेजनासह डीसी मोटर्ससाठी - 0.5 (कमी गतीसाठी) ते 1 (उच्च गतीसाठी);
• समांतर उत्तेजनासह इलेक्ट्रिक मोटर्ससाठी - 1 (कमी गतीसाठी) ते 2 (उच्च गतीसाठी);
एसिंक्रोनस इलेक्ट्रिक मोटर्ससाठी - 0.5 ते 1 पर्यंत; क्रेन आणि सिंक्रोनस इलेक्ट्रिक मोटर्ससाठी - 2 पर्यंत.
मूल्ये शक्ती घटक इंडक्शन मोटर अनेक घटकांवर अवलंबून असते आणि काटेकोरपणे सांगायचे तर, प्रत्येक इलेक्ट्रिक मोटरसाठी भिन्न असते, अगदी त्याच प्रकारच्या.
तथापि, डिझाइन परिस्थितीत अपेक्षित भारांवर अवलंबून पॉवर फॅक्टरची केवळ अंदाजे सरासरी मूल्ये जाणून घेणे पुरेसे आहे.
सरलीकृत पाई चार्टवरून, खालील संबंध प्राप्त होतात:

पदनाम - अंजीर पहा. १.
जेथे tanφ1, विद्युत मोटर P1, kW च्या वास्तविक भाराशी संबंधित फेज अँगलची स्पर्शिका आहे; tanφnom — इलेक्ट्रिक मोटर PH0M च्या नाममात्र लोडशी संबंधित फेज शिफ्ट कोनची स्पर्शिका (मोटर पासपोर्टमध्ये निर्दिष्ट केलेल्या cosφnom द्वारे निर्धारित); σ-उलटण्याच्या क्षणाचे नाममात्राचे गुणोत्तर (1.8-2 च्या अरुंद मर्यादेत आहे);

K3 - लोड फॅक्टर.
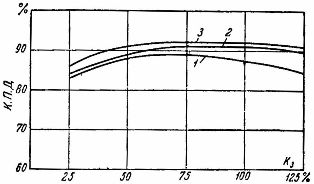
तांदूळ. 1. लोडवर अवलंबून असिंक्रोनस भिन्न इलेक्ट्रिक मोटर्सची कार्यक्षमता वक्र.
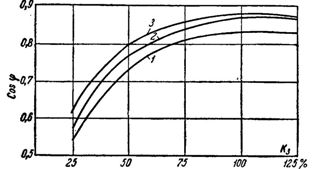
तांदूळ. 2. लोडवर अवलंबून असिंक्रोनस इलेक्ट्रिक मोटर्सच्या पॉवर फॅक्टरचे वक्र.
सर्वात सामान्य प्रकारच्या असिंक्रोनस इलेक्ट्रिक मोटर्ससाठी लोडवरील η आणि cosφ च्या अवलंबनाचे वक्र अंजीर मध्ये दिले आहेत. 1 आणि 2.