जनरेटर सिस्टम - डीसी मोटर
 विविध मशीन टूल्सना चुंबकीय प्रवाह समायोजित करून प्रदान करता येण्यापेक्षा विस्तृत श्रेणीवर ड्राईव्हच्या गतीचे स्टेपलेस नियंत्रण आवश्यक असते. समांतर उत्तेजनासह डीसी मोटर… या प्रकरणांमध्ये, अधिक जटिल इलेक्ट्रिक ड्राइव्ह सिस्टम वापरल्या जातात.
विविध मशीन टूल्सना चुंबकीय प्रवाह समायोजित करून प्रदान करता येण्यापेक्षा विस्तृत श्रेणीवर ड्राईव्हच्या गतीचे स्टेपलेस नियंत्रण आवश्यक असते. समांतर उत्तेजनासह डीसी मोटर… या प्रकरणांमध्ये, अधिक जटिल इलेक्ट्रिक ड्राइव्ह सिस्टम वापरल्या जातात.
अंजीर मध्ये. 1 जनरेटर-मोटर सिस्टीम (संक्षिप्त G — D) नुसार समायोजित करण्यायोग्य इलेक्ट्रिक ड्राइव्हचा आकृती दर्शवितो. या प्रणालीमध्ये, एक इंडक्शन मोटर IM सतत स्वतंत्रपणे उत्तेजित डीसी जनरेटर G आणि एक उत्तेजक B, जो समांतर-उत्तेजित लो-पावर डीसी जनरेटर आहे.
डीसी मोटर डी मशीनच्या कार्यरत शरीराला चालवते. जनरेटर ओव्हीजी आणि मोटर एटीएसचे उत्तेजक विंडिंग एक्सायटर बी द्वारे पुरवले जातात. रिओस्टॅट 1 द्वारे जनरेटर G च्या उत्तेजना सर्किटचा प्रतिकार बदलून, मोटर डीच्या आर्मेचरवर लागू होणारा व्होल्टेज बदलला जातो आणि अशा प्रकारे मोटरचा वेग नियंत्रित केला जातो. या प्रकरणात, मोटर पूर्ण आणि स्थिर प्रवाहाने चालते कारण रिओस्टॅट 2 काढला जातो.
जेव्हा U व्होल्टेज बदलतो, तेव्हा गती बदलते n0 आदर्श मोटर निष्क्रिय गती D. मोटर फ्लक्स आणि त्याचे आर्मेचर सर्किट प्रतिरोध बदलत नसल्यामुळे, उतार b स्थिर राहतो. म्हणून, U च्या भिन्न मूल्यांशी संबंधित रेक्टलाइनर यांत्रिक वैशिष्ट्ये एकाच्या खाली स्थित आहेत आणि एकमेकांना समांतर आहेत (चित्र 2).
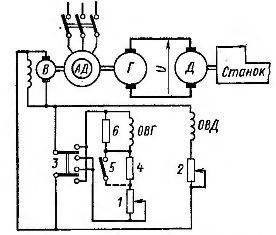
तांदूळ. 1. सिस्टम जनरेटर - DC मोटर (dpt)
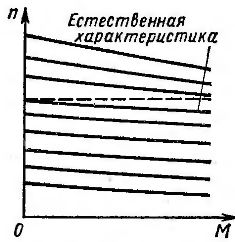
तांदूळ. 2. जनरेटरची यांत्रिक वैशिष्ट्ये — DC मोटर प्रणाली
त्यांच्याकडे स्थिर नेटवर्कमधून दिले जाणारे समान इलेक्ट्रिक मोटरच्या वैशिष्ट्यांपेक्षा जास्त उतार आहे, कारण G — D प्रणालीमध्ये जनरेटरच्या स्थिर उत्तेजित करंटमध्ये व्होल्टेज U अवलंबित्वानुसार वाढत्या लोडसह कमी होते:
जेथे उदा. आणि rg — e, अनुक्रमे. इ. pp. आणि जनरेटरचा अंतर्गत प्रतिकार.
असिंक्रोनस मोटर्सच्या सादृश्याने, आम्ही सूचित करतो
जेव्हा लोड शून्य ते नाममात्र पर्यंत वाढते तेव्हा हे मूल्य इंजिन गती कमी करते. समांतर यांत्रिक वैशिष्ट्यांसाठी
n0 कमी झाल्यावर हे मूल्य वाढते. sn च्या मोठ्या मूल्यांवर, निर्दिष्ट कटिंग परिस्थिती यादृच्छिक लोड चढउतारांसह लक्षणीय बदलेल. म्हणून, व्होल्टेज नियमन श्रेणी सामान्यतः 5:1 पेक्षा कमी असते.
मोटर्सची रेटेड पॉवर कमी झाल्यामुळे, मोटर्समधील व्होल्टेज ड्रॉप वाढते आणि यांत्रिक वैशिष्ट्ये अधिक तीव्र होतात. या कारणास्तव, G -D प्रणालीची व्होल्टेज रेग्युलेशन रेंज कमी होते कारण पॉवर कमी होते (1 kW ते 3:1 किंवा 2:1 पेक्षा कमी पॉवरसाठी).
जनरेटरचा चुंबकीय प्रवाह कमी होत असताना, त्याच्या आर्मेचर प्रतिक्रियेचा डिमॅग्नेटिझिंग प्रभाव त्याच्या व्होल्टेजवर मोठ्या प्रमाणात परिणाम करतो. म्हणून, कमी इंजिन गतीशी संबंधित वैशिष्ट्यांमध्ये यांत्रिक वैशिष्ट्यांपेक्षा प्रत्यक्षात उतार जास्त असतो.
जनरेटरच्या पूर्ण प्रवाहावर तयार होणार्या रिओस्टॅट 2 (चित्र 1) च्या सहाय्याने मोटर डीचा चुंबकीय प्रवाह कमी करून नियंत्रण श्रेणीचा विस्तार साध्य केला जातो. वेग नियमन करण्याची ही पद्धत नैसर्गिकतेच्या वर असलेल्या वैशिष्ट्यांशी संबंधित आहे. एक (चित्र 2 पहा).
एकूण नियंत्रण श्रेणी, दोन्ही पद्धतींच्या नियंत्रण श्रेणींच्या उत्पादनाच्या समान, पोहोचते (10 - 15): 1. व्होल्टेज नियमन हे स्थिर टॉर्क नियंत्रण असते (मोटारचा चुंबकीय प्रवाह अपरिवर्तित राहतो). मोटर डी चे चुंबकीय प्रवाह बदलून नियमन हे स्थिर शक्तीचे नियमन आहे.
मोटर सुरू करण्यापूर्वी, डी रिओस्टॅट 2 (चित्र 1 पहा) पूर्णपणे काढून टाकले जाते आणि मोटर फ्लक्स सर्वोच्च मूल्यापर्यंत पोहोचते. मग रिओस्टॅट 1 जनरेटर G चे उत्तेजना वाढवते. यामुळे व्होल्टेज वाढते आणि मोटर डीचा वेग वाढतो. जर कॉइल OVG उत्तेजक B च्या पूर्ण व्होल्टेज UB शी ताबडतोब कनेक्ट केले असेल, तर त्यातील विद्युत् प्रवाह, इंडक्टन्स आणि सक्रिय प्रतिकार असलेल्या कोणत्याही सर्किटप्रमाणे, वाढेल:
जेथे rv हा उत्तेजित कॉइलचा प्रतिकार आहे, LB हा त्याचा इंडक्टन्स आहे (चुंबकीय सर्किटच्या संपृक्ततेच्या प्रभावाकडे दुर्लक्ष करा).
अंजीर मध्ये. 3, a (वक्र 1) वेळेवर उत्तेजित करंटच्या अवलंबनाचा आलेख दर्शवितो. उत्तेजना प्रवाह हळूहळू वाढते; वाढीचा दर गुणोत्तरानुसार निर्धारित केला जातो

जेथे टीव्ही हा जनरेटरच्या उत्तेजित वळणाचा विद्युत चुंबकीय वेळ स्थिर असतो; त्याला वेळेचे परिमाण आहे.
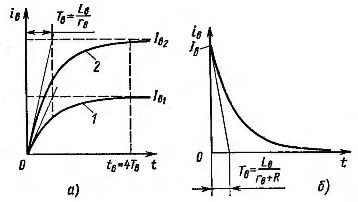
तांदूळ. 3. जी-डी प्रणालीमध्ये उत्तेजना प्रवाह बदलणे
स्टार्ट-अपच्या वेळी जनरेटर व्होल्टेजमधील बदलामध्ये अंदाजे उत्तेजित करंटमधील बदलाप्रमाणेच वर्ण असतो. हे मोटरला रिओस्टॅट 1 काढून आपोआप सुरू करण्यास सक्षम करते (चित्र 1 पहा).
जनरेटरच्या उत्तेजित करंटमधील वाढ बहुतेक वेळा उत्तेजित होण्याच्या सुरुवातीच्या क्षणी नाममात्र पेक्षा जास्त व्होल्टेज विंडिंग करून प्रवेगित (बळजबरीने) केली जाते. नंतर उत्तेजना वाढवण्याची प्रक्रिया वक्र 2 वर चालू राहील (चित्र 3, a पहा. ). जेव्हा कॉइलमधील विद्युत् प्रवाह Iv1 वर पोहोचतो, रेट केलेल्या व्होल्टेजवर स्थिर-स्थितीतील उत्तेजना प्रवाहाच्या बरोबरीने, उत्तेजित कॉइलचा व्होल्टेज नाममात्र पर्यंत कमी केला जातो. उत्तेजित प्रवाहाचा उदय वेळ नाममात्र पर्यंत कमी केला जातो.
जनरेटरच्या उत्तेजनास सक्ती करण्यासाठी, उत्तेजक व्होल्टेज V (चित्र 1 पहा) जनरेटर उत्तेजना कॉइलच्या नाममात्र व्होल्टेजपेक्षा 2-3 पट जास्त निवडले जाते आणि सर्किटमध्ये अतिरिक्त प्रतिरोधक 4 सादर केला जातो. …
जनरेटर-मोटर सिस्टीम रीजनरेटिव्ह ब्रेकिंग सक्षम करते. थांबण्यासाठी, आर्मेचरमधील विद्युत् प्रवाहाने त्याची दिशा बदलणे आवश्यक आहे. टॉर्क देखील चिन्ह बदलेल आणि गाडी चालवण्याऐवजी ब्रेकिंग होईल. जेव्हा मोटर रिओस्टॅट 2 चा चुंबकीय प्रवाह वाढतो किंवा रिओस्टॅट 1 सह जनरेटर व्होल्टेज कमी होतो तेव्हा थांबणे उद्भवते. दोन्ही प्रकरणांमध्ये, उदा. इ. c. मोटरचा E जनरेटरच्या U व्होल्टेजपेक्षा जास्त होतो.या प्रकरणात, मोटर डी जनरेटर मोडमध्ये कार्य करते आणि फिरत्या जनतेच्या गतीज उर्जेद्वारे रोटेशनमध्ये चालविली जाते आणि जनरेटर जी मोटर मोडमध्ये कार्य करते, IM मशीनला सुपरसिंक्रोनस वेगाने फिरवते, जे त्याच वेळी जनरेटर मोडवर स्विच करते आणि नेटवर्कला वीज पुरवठा करते.
रिओस्टॅट्स 1 आणि 2 वर परिणाम न करता पुनर्जन्मात्मक ब्रेकिंग केले जाऊ शकते. तुम्ही फक्त जनरेटर उत्तेजना सर्किट उघडू शकता (उदा. स्विच 3). या प्रकरणात, जनरेटर आणि रेझिस्टर 6 च्या उत्तेजना वळण असलेल्या बंद सर्किटमधील प्रवाह हळूहळू कमी होईल.
जेथे R हा रेझिस्टर 6 चा रेझिस्टन्स आहे.
या समीकरणाशी संबंधित आलेख अंजीर मध्ये दर्शविला आहे. 3, बी. या प्रकरणात जनरेटरच्या उत्तेजित प्रवाहात हळूहळू घट होणे हे रिओस्टॅट 1 च्या प्रतिरोधकतेच्या वाढीसारखे आहे (चित्र 1 पहा) आणि पुनर्जन्म ब्रेकिंगला कारणीभूत ठरते. या सर्किटमध्ये, जनरेटरच्या उत्तेजित विंडिंगसह समांतर जोडलेले रेझिस्टर 6 हे डिस्चार्ज रेझिस्टर आहे. उत्तेजना सर्किटमध्ये अचानक आपत्कालीन व्यत्यय आल्यास ते उत्तेजना विंडिंग इन्सुलेशनचे नुकसान होण्यापासून संरक्षण करते.
जेव्हा उत्तेजना सर्किटमध्ये व्यत्यय येतो तेव्हा, यंत्राचा चुंबकीय प्रवाह झपाट्याने कमी होतो, उत्तेजित कॉइलच्या वळणांमध्ये ई ला प्रेरित करतो. इ. c. सेल्फ-इंडक्टन्स इतका मोठा आहे की त्यामुळे वळणाचे इन्सुलेशन खराब होऊ शकते. डिस्चार्ज रेझिस्टर 6 एक सर्किट तयार करतो ज्यामध्ये ई. इ. c. फील्ड कॉइलच्या स्व-प्रेरणामुळे चुंबकीय प्रवाह कमी होण्यास मंद करणारा विद्युत् प्रवाह निर्माण होतो.
डिस्चार्ज रेझिस्टरवरील व्होल्टेज ड्रॉप फील्ड कॉइलवरील व्होल्टेजच्या बरोबरीचे आहे.डिस्चार्ज रेझिस्टन्सचे मूल्य जितके कमी असेल, सर्किट तुटल्यावर उत्तेजना कॉइलचे व्होल्टेज कमी होईल. त्याच वेळी, डिस्चार्ज रेझिस्टरच्या प्रतिरोधक मूल्यात घट झाल्यामुळे, त्यामधून सतत प्रवाह सामान्य मोडमध्ये वाहतो आणि त्यातील नुकसान वाढते. डिस्चार्ज रेझिस्टन्स व्हॅल्यू निवडताना दोन्ही तरतुदींचा विचार करणे आवश्यक आहे.
जनरेटरचे उत्तेजना वळण बंद केल्यानंतर, अवशिष्ट चुंबकत्वामुळे त्याच्या टर्मिनल्सवर एक लहान व्होल्टेज राहते. यामुळे मोटार क्रिप स्पीड म्हणून ओळखल्या जाणार्या वेगाने फिरू शकते. ही घटना दूर करण्यासाठी, एक्सायटरपासून डिस्कनेक्ट झाल्यानंतर जनरेटरचे उत्तेजना वळण जनरेटरच्या टर्मिनल्सशी जोडले जाते जेणेकरून अवशिष्ट चुंबकत्वातील व्होल्टेजमुळे जनरेटरच्या उत्तेजना विंडिंगमध्ये डिमॅग्नेटिझिंग करंट निर्माण होतो.
इलेक्ट्रिक मोटर डी उलट करण्यासाठी, ओव्हीजी जी जनरेटरच्या उत्तेजित कॉइलमधील विद्युत् प्रवाहाची दिशा स्विच 3 (किंवा अन्य समान उपकरण) वापरून बदलली जाते. कॉइलच्या महत्त्वपूर्ण इंडक्टन्समुळे, उत्तेजना प्रवाह हळूहळू कमी होतो, दिशा बदलतो आणि नंतर हळूहळू वाढतो.
विचारात घेतलेल्या प्रणालीमध्ये मोटर सुरू करणे, थांबवणे आणि उलट करणे या प्रक्रिया अत्यंत किफायतशीर आहेत, कारण त्या आर्मेचरमध्ये समाविष्ट केलेल्या रियोस्टॅट्सचा वापर न करता केल्या जातात. मोटार फक्त लहान फील्ड करंट नियंत्रित करणारी हलकी आणि कॉम्पॅक्ट उपकरणे वापरून सुरू केली जाते आणि कमी केली जाते. म्हणून, या "जनरेटर - डीसी मोटर" प्रणालीचा वापर वारंवार सुरू, ब्रेक आणि रिव्हर्सल्ससह कामासाठी करण्याची शिफारस केली जाते.
मोटार-जनरेटर-डीसी सिस्टीमचे मुख्य तोटे म्हणजे तुलनेने कमी कार्यक्षमता, उच्च किंमत आणि सिस्टममध्ये मोठ्या संख्येने इलेक्ट्रिक मशीन्सच्या उपस्थितीमुळे अवजड. सिस्टीमची किंमत 8 - 10 पट समान शक्ती असलेल्या असिंक्रोनस गिलहरी-पिंजरा मोटरच्या किंमतीपेक्षा जास्त आहे. शिवाय, अशा इलेक्ट्रिक ड्राइव्ह सिस्टम खूप जागा आवश्यक आहे.