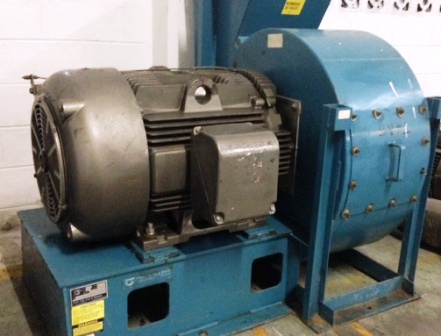
विविध प्रकारचे लोड आणि ऑपरेटिंग मोडसह उपकरणांसाठी इलेक्ट्रिक मोटर्सची निवड
 उत्पादन यंत्रणेसाठी इलेक्ट्रिक मोटर्सची योग्य निवड मानक सेवा आयुष्यभर त्यांचे सतत आणि विश्वासार्ह ऑपरेशन सुनिश्चित करते. ही एक अतिशय महत्त्वाची प्रक्रिया आहे जिथे अनेक भिन्न घटक आणि निकष विचारात घेतले पाहिजेत. सर्वात महत्वाच्या घटकांपैकी एक म्हणजे लोडचे स्वरूप आणि प्रकार विचारात घेणे.
उत्पादन यंत्रणेसाठी इलेक्ट्रिक मोटर्सची योग्य निवड मानक सेवा आयुष्यभर त्यांचे सतत आणि विश्वासार्ह ऑपरेशन सुनिश्चित करते. ही एक अतिशय महत्त्वाची प्रक्रिया आहे जिथे अनेक भिन्न घटक आणि निकष विचारात घेतले पाहिजेत. सर्वात महत्वाच्या घटकांपैकी एक म्हणजे लोडचे स्वरूप आणि प्रकार विचारात घेणे.
निवडताना विचारात घेण्यासाठी येथे सर्व निकष आहेत: योग्य इलेक्ट्रिक मोटर कशी निवडावी
विविध मशीन्स, इंस्टॉलेशन्स आणि मशीन्ससाठी इलेक्ट्रिक मोटर्स निवडताना, विविध प्रकारचे भार, यांत्रिक वैशिष्ट्यांचा प्रकार, या यंत्रणेच्या कार्य चक्रांचे स्वरूप आणि कालावधी विचारात घेणे आवश्यक आहे.
निवडलेल्या इलेक्ट्रिक मोटरच्या शाफ्टवरील भार कसा बदलेल हे जाणून घेतल्यास, ऑपरेशन दरम्यान विजेचे नुकसान कसे बदलेल हे अचूकपणे निर्धारित करणे शक्य आहे आणि याबद्दल धन्यवाद, दिलेल्या लोडवर काम करणारी इलेक्ट्रिक मोटर निवडा जी जास्त गरम होणार नाही. . संपूर्ण कामकाजाच्या चक्रादरम्यान इलेक्ट्रिक मोटरच्या इन्सुलेशनचे जास्तीत जास्त गरम तापमान परवानगीयोग्य मूल्यापेक्षा जास्त होणार नाही.
उत्पादन यंत्रणेच्या इलेक्ट्रिक मोटर्सच्या चुकीच्या निवडीमुळे उत्पादन प्रक्रियेत व्यत्यय येतो आणि उत्पादित उत्पादनांचे नुकसान आणि अतिरिक्त वीज खर्च होतो.
इलेक्ट्रिक मोटर्ससह इलेक्ट्रिकल उपकरणे पूर्णपणे तांत्रिक प्रक्रियेच्या आवश्यकता पूर्ण करणे आवश्यक आहे.
खालील अटी पूर्ण झाल्यास इलेक्ट्रिक मोटर्सच्या कॅटलॉग प्रकारांपैकी एकाची निवड योग्य मानली जाते:
-
यांत्रिक गुणधर्मांच्या बाबतीत कार्यरत मशीन (ड्राइव्ह यंत्रणा) सह इलेक्ट्रिक मोटरचा सर्वात संपूर्ण पत्रव्यवहार. याचा अर्थ असा की इलेक्ट्रिक मोटरमध्ये असे यांत्रिक वैशिष्ट्य असणे आवश्यक आहे की ते स्थिर आणि क्षणिक स्थितीत गती आणि प्रवेग आवश्यक मूल्यांसह ड्राइव्ह प्रदान करू शकते;
-
सर्व ऑपरेटिंग मोडमध्ये इलेक्ट्रिक मोटर पॉवरचा जास्तीत जास्त वापर. सर्वात गंभीर ऑपरेटिंग मोडमध्ये इलेक्ट्रिक मोटरच्या सर्व सक्रिय भागांचे तापमान परवानगी असलेल्या हीटिंग तापमानाच्या शक्य तितके जवळ असले पाहिजे, परंतु त्यापेक्षा जास्त नसावे;
-
ड्राइव्हसह इलेक्ट्रिक मोटरची सुसंगतता आणि डिझाइनच्या दृष्टीने पर्यावरणीय परिस्थिती;
-
वीज पुरवठ्याच्या पॅरामीटर्ससह इलेक्ट्रिक मोटरचे अनुपालन.
इलेक्ट्रिक मोटर निवडण्यासाठी, खालील डेटा आवश्यक आहे:
-
ड्राइव्ह यंत्रणेचे प्रकार आणि नाव;
-
जास्तीत जास्त शाफ्ट पॉवर, जर ऑपरेटिंग मोड सतत असेल आणि भार स्थिर असेल आणि इतर प्रकरणांमध्ये, वेळेचे कार्य म्हणून शाफ्टच्या शक्ती किंवा प्रतिकाराच्या क्षणातील बदलांचे आलेख;
-
ड्राइव्ह शाफ्टची रोटेशनल वारंवारता (किंवा रोटेशनल वारंवारता श्रेणी);
-
इलेक्ट्रिक मोटरच्या शाफ्टसह ड्राइव्ह मेकॅनिझमच्या अभिव्यक्तीची पद्धत (किनेमॅटिक ट्रान्समिशनच्या उपस्थितीत, ट्रान्समिशनचा प्रकार आणि गीअर रेशो दर्शविला जातो);
-
इलेक्ट्रिक मोटरने ड्राइव्ह शाफ्टला प्रदान करणे आवश्यक असलेले टॉर्क सुरू करण्याचे प्रमाण;
-
गती नियमन मर्यादा (वरच्या आणि खालच्या मूल्ये आणि संबंधित शक्ती आणि टॉर्क मूल्ये);
-
गती नियंत्रणाची आवश्यक गुणवत्ता (गुळगुळीतपणा, श्रेणीकरण);
-
एका तासाच्या आत ड्राइव्हच्या सक्रियतेची वारंवारता;
-
बाह्य वातावरणाची वैशिष्ट्ये.
सर्व अटी आणि नाममात्र डेटा विचारात घेऊन इलेक्ट्रिक मोटरची निवड कॅटलॉगनुसार केली जाते.

इलेक्ट्रिक ड्राईव्हच्या ऑपरेशनच्या संभाव्य पद्धती सायकलचे स्वरूप आणि कालावधी, लोड व्हॅल्यू, कूलिंग कंडिशन, स्टार्ट लॉस आणि सुरळीत चालण्याचे प्रमाण इत्यादींनुसार मोठ्या प्रमाणात ओळखल्या जातात, म्हणून प्रत्येकासाठी इलेक्ट्रिक मोटर्सचे उत्पादन इलेक्ट्रिक ड्राइव्हच्या ऑपरेशनच्या संभाव्य पद्धतींचा व्यावहारिक अर्थ नाही.
रिअल मोड्सच्या विश्लेषणावर आधारित, मोड्सचा एक विशेष वर्ग ओळखला जातो - नाममात्र मोड, ज्यासाठी सिरीयल इंजिन डिझाइन आणि तयार केले जातात.
इलेक्ट्रिक मशीनच्या पासपोर्टमध्ये असलेला डेटा विशिष्ट नाममात्र मोडचा संदर्भ देतो आणि त्याला इलेक्ट्रिक मशीनचा नाममात्र डेटा म्हणतात.
उत्पादक हमी देतात की जेव्हा इलेक्ट्रिक मोटर रेटेड लोडवर रेटेड मोडमध्ये चालते, तेव्हा ती पूर्णपणे थर्मलली वापरली जाते.
वर्तमान GOST 8 नाममात्र मोड प्रदान करते, जे आंतरराष्ट्रीय वर्गीकरणानुसार S1 - S8 चिन्हे आहेत.
कंटिन्युअस ड्यूटी S1 - मशीनच्या सर्व भागांचे स्थिर तापमान मिळविण्यासाठी पुरेसा वेळ सतत लोडवर चालवणे.
शॉर्ट टर्म ड्यूटी S2 - मशीनच्या सर्व भागांना सेट तापमानापर्यंत पोहोचण्यासाठी अपुरा वेळेसाठी सतत लोडवर मशीनचे ऑपरेशन, त्यानंतर मशीनला 2 पेक्षा जास्त तापमानात थंड करण्यासाठी पुरेसा वेळ मशीन थांबवून सभोवतालच्या तापमानापासून ° से. अल्प-मुदतीच्या कामासाठी, कामाचा कालावधी 15, 30, 60, 90 मिनिटे आहे.
इंटरमिटंट ड्युटी S3 - समान कर्तव्य चक्रांचा एक क्रम, ज्यामध्ये प्रत्येकामध्ये सतत लोड ऑपरेशनची वेळ समाविष्ट असते ज्या दरम्यान मशीन सेट तापमानापर्यंत गरम होत नाही आणि पार्किंगची वेळ ज्या दरम्यान मशीन सभोवतालच्या तापमानापर्यंत थंड होत नाही.
या मोडमध्ये, कर्तव्य चक्र असे आहे की इनरश करंट तापमान वाढीवर लक्षणीय परिणाम करत नाही. थर्मल समतोल साधण्यासाठी सायकल वेळ अपुरा आहे आणि 10 मिनिटांपेक्षा जास्त नाही. मोड टक्केवारीमध्ये समाविष्ट करण्याच्या कालावधीच्या मूल्याद्वारे दर्शविला जातो:
या कार्यपद्धतीसाठी उद्योगाद्वारे उत्पादित मोटर्स ड्यूटी सायकल (पीव्ही) द्वारे दर्शविले जातात, ज्याची व्याख्या एका कर्तव्य चक्राच्या कालावधीद्वारे केली जाते.
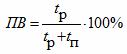
जेथे tp इंजिन चालू आहे; tp - विराम वेळ.
समावेशाच्या कालावधीची प्रमाणित मूल्ये: 15, 25, 40, 60% किंवा कामकाजाच्या कालावधीची संबंधित मूल्ये: 0.15; 0.25; 0.40; ०.६०. S3 मोडसाठी, रेट केलेला डेटा केवळ एका विशिष्ट कर्तव्य चक्राशी संबंधित असतो आणि कर्तव्य कालावधीचा संदर्भ देतो.
मोड्स S1 — S3 सध्या मुख्य आहेत, ज्यासाठी नाममात्र डेटा स्थानिक इलेक्ट्रिक वाहन कारखान्यांद्वारे मशीनच्या कॅटलॉग आणि पासपोर्टमध्ये समाविष्ट केला जातो.
याबद्दल अधिक वाचा येथे: इलेक्ट्रिक मोटर्सचे ऑपरेटिंग मोड
पॉवरच्या दृष्टीने वाजवी मोटार निवडीसाठी, मोटार शाफ्टचा भार कालांतराने कसा बदलतो हे जाणून घेणे आवश्यक आहे, ज्यामुळे वीज तोट्यातील बदलाच्या स्वरूपाचे मूल्यांकन करणे शक्य होते.
याव्यतिरिक्त, त्यातील ऊर्जा तोटा सोडल्याच्या परिणामी इंजिन गरम करण्याची प्रक्रिया कशी पुढे जाते हे स्थापित करणे आवश्यक आहे. हा दृष्टीकोन आपल्याला अशा प्रकारे मोटर निवडण्याची परवानगी देतो की विंडिंग इन्सुलेशनचे कमाल तापमान परवानगीयोग्य मूल्यापेक्षा जास्त नसेल. इंजिनच्या संपूर्ण सेवा जीवनात विश्वसनीय ऑपरेशन सुनिश्चित करण्यासाठी ही स्थिती मुख्य आहे.
इलेक्ट्रिक मोटरच्या शक्तीची निवड कार्यरत मशीनवरील भारांच्या स्वरूपानुसार केली जाणे आवश्यक आहे. या वर्णाचे दोन कारणांवर मूल्यांकन केले जाते:
-
ऑपरेशनच्या नाममात्र मोडनुसार;
-
वापरलेल्या उर्जेच्या प्रमाणात बदल करून.
इंजिन पॉवरने तीन अटी पूर्ण केल्या पाहिजेत:
-
ऑपरेशन दरम्यान सामान्य हीटिंग;
-
पुरेशी ओव्हरलोड क्षमता;
-
पुरेसा प्रारंभिक टॉर्क.
तथाकथित सह इलेक्ट्रिक मोटर्सची निवडशेड्यूलनुसार सर्वात मोठ्या संभाव्य भारावर आधारित "पॉवर रिझर्व्ह", इलेक्ट्रिक मोटरचा वापर कमी करण्यास कारणीभूत ठरतो आणि त्यामुळे पॉवर घटक आणि कार्यक्षमता कमी झाल्यामुळे भांडवली खर्च आणि परिचालन खर्च वाढतो. इंजिन पॉवरमध्ये जास्त वाढ झाल्याने प्रवेग दरम्यान धक्का देखील होऊ शकतो.
जर इलेक्ट्रिक मोटरने स्थिर किंवा किंचित बदलत्या भाराने बराच काळ काम केले पाहिजे, तर त्याची शक्ती निश्चित करणे कठीण नाही आणि सूत्रांनुसार चालते. ऑपरेशनच्या इतर पद्धतींमध्ये इलेक्ट्रिक मोटर्सची शक्ती निवडणे अधिक कठीण आहे.

अल्प-मुदतीचा भार या वस्तुस्थितीद्वारे दर्शविला जातो की समावेशाचा कालावधी लहान असतो आणि इलेक्ट्रिक मोटरच्या संपूर्ण कूलिंगसाठी ब्रेक पुरेसे असतात. या प्रकरणात, असे मानले जाते की स्विचिंग कालावधी दरम्यान इलेक्ट्रिक मोटरवरील भार स्थिर किंवा जवळजवळ स्थिर राहतो.
या मोडमध्ये गरम करण्यासाठी इलेक्ट्रिक मोटर योग्यरित्या वापरण्यासाठी, ते निवडणे आवश्यक आहे जेणेकरून त्याची सतत शक्ती (कॅटलॉगमध्ये दर्शविलेली) अल्प-मुदतीच्या लोडशी संबंधित शक्तीपेक्षा कमी असेल, म्हणजे. इलेक्ट्रिक मोटरला त्याच्या अल्प-मुदतीच्या ऑपरेशनच्या कालावधीत थर्मल ओव्हरलोड असतो...
जर इलेक्ट्रिक मोटरच्या ऑपरेशनचा कालावधी त्याच्या संपूर्ण हीटिंगसाठी आवश्यक असलेल्या वेळेपेक्षा लक्षणीयरीत्या कमी असेल, परंतु स्विचिंगच्या कालावधी दरम्यानचे विराम पूर्ण थंड होण्याच्या वेळेपेक्षा लक्षणीयरीत्या कमी असतील, तर पुनरावृत्ती अल्प-मुदतीचे लोडिंग होते.
सतत ऑपरेशनसाठी पॉवर गणना आणि मोटर निवड
स्थिर किंवा किंचित भिन्न शाफ्ट लोडसह, मोटर पॉवर फक्त लोड पॉवरपेक्षा किंचित जास्त असावी.या प्रकरणात, अट पूर्ण करणे आवश्यक आहे
Pn ≥ P,
जेथे Pn रेट केलेले इंजिन पॉवर आहे; पी - लोड पॉवर. इंजिन निवडणे हे कॅटलॉगमधून निवडण्यापर्यंत येते.
सतत ऑपरेशनसाठी इंजिन पॉवरची निवड. उत्पादन यंत्रणेचा टॉर्क आणि शक्ती बदलत नसल्यास, ट्रान्समिशन (गिअरबॉक्स) मधील नुकसान लक्षात घेऊन लोडच्या सामर्थ्याइतकी नाममात्र पॉवर Pn असलेली मोटर निवडली पाहिजे:
Pn ≥ Pm /ηt, W
जेथे ηt ट्रान्समिशन (गिअरबॉक्स) कार्यक्षमता आहे.
ड्राइव्ह यंत्रणा Ms, N ∙ m आणि गीअरबॉक्स n2 च्या आउटपुट शाफ्टच्या रोटेशनची वारंवारता, rpm च्या प्रतिकाराच्या दिलेल्या क्षणी
Pm = Mc ∙ ω2, W
जेथे ω2 = 2π ∙ n2 / 60, rad/s
शाफ्टच्या प्रतिकाराच्या स्थिर क्षणासह सतत मोडमध्ये कार्यरत असलेल्या काही उत्पादन यंत्रणेसाठी, मोटर्सची शक्ती निर्धारित करण्यासाठी अंदाजे सूत्रे आहेत.
पॉवर गणना आणि शॉर्ट टर्म लोडसाठी मोटर निवड
इलेक्ट्रिक ड्राइव्हच्या शॉर्ट-टर्म ऑपरेशनसाठी मोटर्स त्यांच्या रेट केलेल्या पॉवरनुसार निवडल्या जातात, जे ऑपरेशनचा कालावधी लक्षात घेऊन लोड पॉवरच्या समान असणे आवश्यक आहे. उद्योगाद्वारे अल्पकालीन ऑपरेशनसाठी तयार केलेल्या इंजिनसाठी मानक स्वीकार्य मूल्ये 10, 30, 60, 90 मिनिटे आहेत.
इंटरमिटंट ड्युटी मोटर्सच्या अनुपस्थितीत, इंटरमिटंट ड्यूटी मोटर्स स्थापित केल्या जाऊ शकतात. या प्रकरणात, 30 मिनिटांचा रन टाइम ड्यूटी सायकल = 15%, 60 मिनिटे ड्यूटी सायकल = 25% आणि 90 मिनिटे ड्यूटी सायकल = 40% शी संबंधित आहे.शेवटचा उपाय म्हणून, Pn < P सह सतत ऑपरेशनसाठी आणि त्यानंतरच्या थर्मल स्थितीसाठी मोटर्सचा वापर करणे शक्य आहे.
अधूनमधून लोडसाठी पॉवर गणना आणि मोटर निवड
इंटरमिटंट मोडमध्ये कार्यरत इलेक्ट्रिक ड्राइव्हसाठी, मोटर पॉवरची गणना सरासरी नुकसान पद्धत किंवा समतुल्य मूल्ये वापरून केली जाते. पहिली पद्धत अधिक अचूक आहे, परंतु अधिक श्रम-केंद्रित आहे. समतुल्य मूल्यांची पद्धत वापरणे अधिक सोयीचे आहे. दिलेल्या लोड शेड्यूलवर अवलंबून P = f (t), M = f (t), I = f (t), सरासरी वर्ग मूल्ये निर्धारित केली जातात, जे आहेत समतुल्य म्हणतात.
समतुल्य शक्ती ही लोड आकृतीची RMS शक्ती आहे
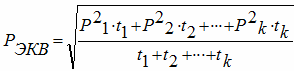
जेथे t1, t2, …, tk — वेळ अंतराल ज्यामध्ये लोड पॉवर अनुक्रमे P1, P2, …, Pk च्या समान आहे.
कॅटलॉगनुसार, Reqv आणि PV च्या प्राप्त मूल्यांसाठी, मोटर रेट केलेली शक्ती Pn ≥ REKV या स्थितीतून निवडली जाते.
आकृती M = f(t) दिल्यास, समतुल्य क्षण
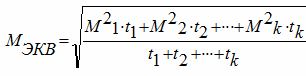
आणि n वेगाने समतुल्य शक्ती अभिव्यक्तीद्वारे दिली जाते
Req = Meq • n / 9550 (kW).
I = f (t) आकृती दिल्यास, गरम समतुल्य प्रवाह
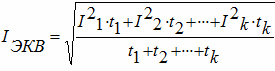
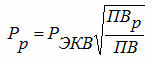
PVr चे गणना केलेले मूल्य बहुतेक वेळा मानक मूल्यांपेक्षा वेगळे असते, म्हणून एकतर PVr चे प्राप्त मूल्य जवळच्या मानक मूल्यापर्यंत पूर्ण केले जाते किंवा सूत्र वापरून समतुल्य शक्तीची पुनर्गणना केली जाते.
ऑपरेशन दरम्यान, अल्पकालीन ओव्हरलोड्स दिसून येतात जे मोटरच्या नाममात्र शक्तीपेक्षा जास्त असतात. ते इंजिनच्या गरम होण्यावर लक्षणीय परिणाम करत नाहीत, परंतु चुकीचे ऑपरेशन किंवा स्टॉलिंग होऊ शकतात. म्हणून, अभिव्यक्तीनुसार मोटरची ओव्हरलोड क्षमता तपासली पाहिजे
Pm / Pn = ku ∙ Mm / Mn,
जेथे लोड डायग्राममध्ये Pm ही सर्वोच्च शक्ती आहे; एमएम / एमएन - कमाल टॉर्कचे गुणक कॅटलॉगद्वारे निर्धारित केले जाते; गुणांक ku = 0.8 नेटवर्कमधील संभाव्य व्होल्टेज ड्रॉप लक्षात घेते.
ही अट पूर्ण न झाल्यास, कॅटलॉगमधून उच्च शक्ती असलेली मोटर निवडली पाहिजे आणि ओव्हरलोड क्षमतेसाठी पुन्हा तपासली पाहिजे.
या विषयावर देखील पहा: मधूनमधून ऑपरेशनसाठी इंजिनची निवड

उद्योग मधूनमधून लोड मोटर्सच्या अनेक मालिका तयार करतो:
-
एमटीकेएफ मालिकेतील गिलहरी रोटरसह आणि एमटीएफ मालिकेतील फेज रोटरसह असिंक्रोनस क्रेन;
-
समान मेटलर्जिकल मालिका एमटीकेएन आणि एमटीएन;
-
डीसी मालिका डी.
निर्दिष्ट मालिकेतील मशीन्स एका लांबलचक रोटर (अँकर) च्या आकाराने दर्शविले जातात, जे जडत्वाच्या क्षणात घट प्रदान करते. ट्रान्झिएंट्स दरम्यान स्टेटर विंडिंगमध्ये सोडलेले नुकसान कमी करण्यासाठी, MTKF आणि MTKN सीरीजच्या मोटर्समध्ये नाममात्र स्लिप स्नॉम = 7 ÷ 12% वाढले आहे. क्रेन आणि मेटलर्जिकल सीरीजच्या मोटर्सची ओव्हरलोड क्षमता 2.3 — 3 ड्युटी सायकल = 40% आहे, जी ड्यूटी सायकलवर = 100% λ = Mcr/Mnom100 = 4.4-5.5 शी संबंधित आहे.