स्व-उत्तेजनाद्वारे डायनॅमिक ब्रेकिंग मोडमध्ये ऑपरेशनसाठी असिंक्रोनस इलेक्ट्रिक मोटरची निवड
 सर्वात सोप्या नियंत्रण योजनेसह जखमेच्या रोटरसह असिंक्रोनस इलेक्ट्रिक मोटर - रोटर सर्किटमध्ये प्रतिरोधकता समाविष्ट करणे अत्यंत कमी नियंत्रण गुणधर्म आहेत. म्हणून, मार्केटमध्ये फ्रिक्वेन्सी कन्व्हर्टर उपलब्ध होण्यापूर्वी, स्टेप-डाउन मोडमध्ये कमी गती मिळविण्यासाठी विविध योजना विकसित केल्या गेल्या.
सर्वात सोप्या नियंत्रण योजनेसह जखमेच्या रोटरसह असिंक्रोनस इलेक्ट्रिक मोटर - रोटर सर्किटमध्ये प्रतिरोधकता समाविष्ट करणे अत्यंत कमी नियंत्रण गुणधर्म आहेत. म्हणून, मार्केटमध्ये फ्रिक्वेन्सी कन्व्हर्टर उपलब्ध होण्यापूर्वी, स्टेप-डाउन मोडमध्ये कमी गती मिळविण्यासाठी विविध योजना विकसित केल्या गेल्या.
खरं तर, त्यापैकी फारसे नाहीत. परदेशात, अतिरिक्त इलेक्ट्रिक मशीनचा वापर-मुख्य इंजिन सारख्याच शाफ्टवर बसवलेला व्होर्टेक्स ब्रेक-व्यापक बनला. भार कमी करताना ही योजना आपल्याला पुरेशी कठोर यांत्रिक वैशिष्ट्ये मिळविण्यास अनुमती देते, परंतु अशा इलेक्ट्रिक ड्राइव्हमध्ये अत्यंत कमी उर्जा वैशिष्ट्ये आहेत (ब्रेकिंग ऊर्जा भोवरा ब्रेकमध्ये सोडली जाते). याव्यतिरिक्त, व्हर्टेक्स ब्रेकची किंमत जास्त आहे आणि यांत्रिक भागाच्या लेआउटला मोठ्या प्रमाणात गुंतागुंत करते.
म्हणून, 1970 च्या दशकाच्या उत्तरार्धात डायनॅमो प्लांटमध्ये फेज रोटरसह असिंक्रोनस मोटरवर आधारित लिफ्टिंग यंत्रणेमध्ये लँडिंगचा वेग प्राप्त करण्यासाठी, ई.एम. यांच्या नेतृत्वाखाली एक डिझाइन टीम. पेव्हझनरने स्वयं-उत्साही डायनॅमिक ब्रेकिंग सादर केले.
अशा इलेक्ट्रिक ड्राइव्हचा वापर घरगुती क्रेनमध्ये मोठ्या प्रमाणावर केला जातो (टीएसडी, टीएसडीआय, पुलासाठी केएसडीबी, गॅन्ट्री आणि गॅन्ट्री क्रेन, टॉवर क्रेनसाठी नियंत्रण पॅनेल KB-309, KB-403, KB-404, KB-405, KB) - 406, KB-408, KB-415, KB-415-07, KB-473, KBM-401P.). अशा प्रकारे, आम्ही कार्यान्वित असलेल्या हजारो क्रेनबद्दल बोलत आहोत.
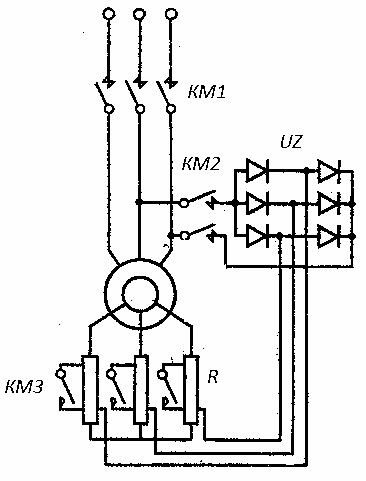
तांदूळ. 1. स्व-उत्तेजनाद्वारे डायनॅमिक ब्रेकिंग मोडमध्ये अॅसिंक्रोनस मोटर समाविष्ट करण्याची योजना
स्व-उत्तेजनासह डायनॅमिक ब्रेकिंगचे तत्त्व खालीलप्रमाणे आहे:
रोटर सर्किट समाविष्ट आहे तीन-चरण रेक्टिफायर UZ (Fig. 1). इलेक्ट्रिक मोटर कॉन्टॅक्टर KM1 द्वारे नेटवर्कवरून डिस्कनेक्ट केली आहे. रेक्टिफाइड व्होल्टेज कॉन्टॅक्टर KM2 द्वारे स्टेटर विंडिंगशी जोडलेले आहे. संपर्ककर्ता संपर्क KM3 बंद आहेत. जेव्हा ब्रेक सोडला जातो (आकृतीमध्ये दर्शविला जात नाही), तेव्हा मोटर शाफ्ट कमी वजनाच्या कृती अंतर्गत फिरू लागतो.
रोटर विंडिंगमध्ये ईएमएफ प्रेरित केला जातो, ज्याच्या प्रभावाखाली रोटर-स्टेटर सर्किटमध्ये विद्युत प्रवाह वाहू लागतो. मोटर ब्रेकिंग टॉर्क विकसित करते, भार स्थिर वेगाने कमी केला जातो. गती मूल्य रोटर सर्किटच्या प्रतिकार मूल्याद्वारे निर्धारित केले जाते. प्रतिकार जितका जास्त तितका वेग कमी होण्याचा दर. वेग वाढवण्यासाठी, कॉन्टॅक्टर KM3 बंद आहे.
सेल्फ-एक्सिटेशन डायनॅमिक ब्रेकिंग मोडमध्ये, इलेक्ट्रिक ड्राइव्ह केवळ ब्रेक हायड्रॉलिक पुशर आणि रिले-कॉन्टॅक्टर उपकरणांना उर्जा देण्यासाठी नेटवर्कमधून उर्जा वापरते. उदाहरण म्हणून, अंजीर. 7 टीएसडी पॅनेलसह इलेक्ट्रिक ड्राइव्हची यांत्रिक वैशिष्ट्ये दर्शविते.
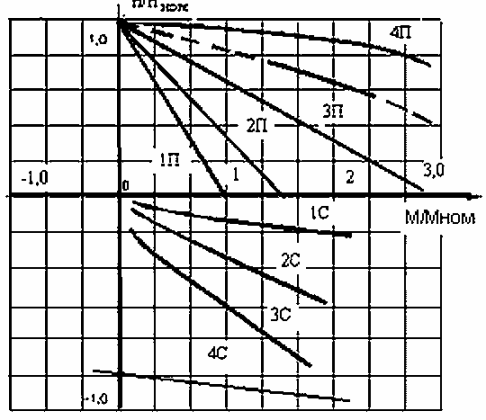
तांदूळ. 2. टीएसडी पॅनेलसह लिफ्टिंग यंत्रणेच्या इलेक्ट्रिक ड्राइव्हची यांत्रिक वैशिष्ट्ये
डायनॅमिक ब्रेकिंग वैशिष्ट्ये 1C, 2C, 3C म्हणून नियुक्त केली आहेत. हे पाहिले जाऊ शकते की वैशिष्ट्यांमध्ये पुरेशी कडकपणा आहे. गती समायोजन 1: 8 श्रेणीमध्ये केले जाते, जे बहुतेक प्रकरणांमध्ये वस्तुमान नळांसाठी पुरेसे असते.
इलेक्ट्रिक मोटरच्या स्वयं-उत्तेजनाची अट आहेः
जेथे x '2- रोटर विंडिंगचा प्रेरक प्रतिरोध, ओम; хо- चुंबकीय सर्किटचा प्रेरक प्रतिकार. ओम
जेथे ks — योजनेचा गुणांक
kd — स्टेटर करंटमध्ये रोटर करंट कमी करण्याचा गुणांक; kcx — सुधार सर्किट गुणांक, तीन-फेज ब्रिज सर्किट kx = 0.85; kt हे मोटरचे स्टेटर ते रोटरपर्यंतचे परिवर्तन गुणांक आहे
गुणांक kd हे स्टेटर विंडिंग्सच्या कनेक्शन योजनेवर अवलंबून असते, जे 380 V च्या मुख्य व्होल्टेजवर घरगुती नळाच्या मोटर्समध्ये तारेशी जोडलेले असते.
गुणांक kt परिवर्तन गुणांकावर अवलंबून असतो, म्हणजे. स्टेटर व्होल्टेज आणि रोटर व्होल्टेजचे गुणोत्तर, जे मोटर प्रकारावर अवलंबून असते. उदाहरणार्थ, MT आणि 4MT मालिकेच्या अनेक इलेक्ट्रिक मोटर्ससाठी, मूल्य आणि संबंधित पॅरामीटर्स सारणीबद्ध आहेत. १.
तक्ता 1.
इलेक्ट्रिक मोटर प्रकार पॉवर, kWt रोटर व्होल्टेज, V kt x x '2 xho √(1 + 2x '2/ho) MTN412-6 30 255 1.5 1.3 0.173 3.74 1.04 4MTN225L6 55 290 1.31910MT.31310MT ५१२-६ ५५ ३४० १.११ ०.९८ 0.197 3.8 1.05 4MTN280L10 75 308 1.23 1.06 0.146 2.33 1.06 4MTN280M6 110 420 0. 9 0.7 0.083 2.981.
कंडिशन кс ≥ √(1 + 2х '2/хо) MTN412-6, 4MTN225L6 प्रकारच्या इंजिनसाठी चालते, ज्याला "उत्साही" म्हटले जाऊ शकते. अशा इलेक्ट्रिक मोटर्स अतिरिक्त सर्किट निर्णय न घेता स्वयं-उत्तेजना मोडमध्ये प्रवेश करतात. तथापि, अशा मोटर्ससह एकत्र काम करण्यासाठी डिझाइन केलेल्या कमी-व्होल्टेज पूर्ण उपकरणांमध्ये (लो-व्होल्टेज स्विचगियर किंवा नियंत्रण पॅनेल), विश्वसनीय ऑपरेशनसाठी एक लहान प्रारंभिक उत्तेजना प्रदान केली जाते.
प्रारंभिक उत्तेजना एक स्थिर, तथाकथित पार करून चालते अर्ध-वेव्ह रेक्टिफायरमधून "सप्लाय करंट" चे एक लहान मूल्य (सामान्यत: मोटरच्या रेट केलेल्या करंटच्या 10% पेक्षा जास्त नाही). उत्तेजित मोटर्ससाठी, कोणत्याही परिस्थितीत, स्वयं-उत्तेजित डायनॅमिक ब्रेकिंग मोडमध्ये विश्वासार्ह संक्रमणासाठी हे पुरेसे आहे.
इलेक्ट्रिक मोटर्स MTN512-6, 4MTN280M6, ज्यासाठी кс ≥ √(1 + 2х '2/хо) ही स्थिती समाधानी नाही, "अनउत्तेजित" आहेत. याचा अर्थ असा नाही की अशा मोटर्स स्वयं-उत्तेजनासह डायनॅमिक ब्रेकिंग मोडमध्ये कार्य करू शकत नाहीत, परंतु त्यांच्यासाठी आवश्यक असलेल्या अतिरिक्त प्रवाहाचे मूल्य स्टेटरच्या रेट केलेल्या प्रवाहाच्या 50% पर्यंत पोहोचते.यामुळे उत्तेजित नसलेल्या इलेक्ट्रिक मोटर्ससाठी विशेष NKU (नियंत्रण पॅनेल) वापरणे आवश्यक आहे. …
кс = √(1 + 2х '2/хо) सह इलेक्ट्रिक मोटर प्रकार 4MTN280L10 स्वयं-उत्तेजनाच्या मर्यादेवर आहे आणि पॅरामीटर्समधील कोणताही यादृच्छिक बदल स्वयं-उत्तेजनाच्या स्थितीचे उल्लंघन करू शकतो. म्हणून, अशा मोटरला गैर-उत्तेजक म्हणून वर्गीकृत केले जाऊ शकते.
इलेक्ट्रिक मोटरच्या स्वयं-उत्तेजित करण्याच्या क्षमतेवर परिणाम करणारे मुख्य पॅरामीटर्स म्हणजे रोटर E2nom चे रेट केलेले व्होल्टेज. E2nom चे गंभीर मूल्य, ज्यावर मोठ्या पुरवठा करंटशिवाय स्वयं-उत्तेजना उद्भवत नाही, 300 V म्हणून घेतले पाहिजे.
डायनॅमो प्लांट आणि सिबेलेक्ट्रोमोटर पीओने 1980 च्या दशकाच्या सुरुवातीला 4MT क्रेन इलेक्ट्रिक मोटर्सची मालिका विकसित करताना सेल्फ-एक्सिटेशन डायनॅमिक ब्रेकिंग मोडचे हे वैशिष्ट्य लक्षात घेतले.
विशेषतः, काही इलेक्ट्रिक मोटर्ससाठी E2nom मूल्य पूर्वीच्या MT मालिकेच्या तुलनेत कमी केले गेले आहे जेणेकरून मोटर्स उत्साहवर्धक बनतील.
उदाहरणार्थ, टॉवर क्रेनच्या इलेक्ट्रिक ड्राइव्हमध्ये मोठ्या प्रमाणावर वापरल्या जाणार्या 4MTN225L6 इलेक्ट्रिक मोटरसाठी, E2nom पूर्वीच्या MTN512-6 सीरीज मोटरच्या तुलनेत 340 ते 290 V पर्यंत कमी केले गेले, ज्यामुळे मोटर स्वयं-उत्साही झाली. नंतर, OJSC "Sibelectromotor" ने समान पॅरामीटर्ससह इलेक्ट्रिक मोटर 4MTM225L6 चे उत्पादन सुरू केले.
कालांतराने, समान हेतू असलेल्या इलेक्ट्रिक मोटर्स इतर उत्पादकांनी तयार करण्यास सुरवात केली.
Rzhevsky Crane Construction Plant MKAF225L6 इलेक्ट्रिक मोटर तयार करते, सायबेरियन इलेक्ट्रोटेक्निकल कंपनी 4MTM225L6 PND इलेक्ट्रिक मोटर तयार करते.प्रत्येक उत्पादकाच्या तांत्रिक क्षमतेशी संबंधित प्रोटोटाइपपेक्षा भिन्न स्वरूप असूनही, या सर्व इलेक्ट्रिक मोटर्समध्ये समान इलेक्ट्रिकल पॅरामीटर्स आणि इंस्टॉलेशन परिमाणे आहेत आणि ते पूर्णपणे बदलण्यायोग्य आहेत.
इंजिनांच्या नावांमधील फरक वापरकर्त्याला त्याच्या स्वत: च्या प्राधान्ये, किंमत, वितरण वेळ इत्यादीद्वारे मार्गदर्शन करून एक किंवा दुसर्या उत्पादकाची माहितीपूर्ण निवड करण्यास अनुमती देतो. आणि त्याच वेळी, पूर्णपणे खात्री करा की एका नल उत्पादकाची इलेक्ट्रिक मोटर दुसर्या उत्पादकाच्या इलेक्ट्रिक मोटरने बदलल्याने नळ खराब होणार नाही किंवा अपघात होणार नाही.
तथापि, गेल्या दशकात, विविध उत्पादकांकडून इलेक्ट्रिक मोटर्स देशांतर्गत बाजारात दिसू लागल्या आहेत, ज्याचा ब्रँड जेएससी "सिबेलेक्ट्रोमोटर" द्वारे उत्पादित "मूळ" इलेक्ट्रिक मोटरच्या ब्रँडचे पुनरुत्पादन करतो. असे गृहीत धरले जाऊ शकते की इलेक्ट्रिक मोटर्सची उत्पत्ती आपल्या देशाच्या मोठ्या पूर्वेकडील शेजारीशी जोडलेली आहे. त्यांची किंमत पारंपारिक उत्पादकांपेक्षा किंचित कमी आहे, म्हणून एंटरप्राइजेसच्या पुरवठ्यांमधून त्यांच्यामध्ये स्वारस्य समजण्यासारखे आहे.
अशा प्रकारे, उत्पादित क्रेनवर स्थापित करण्यासाठी इलेक्ट्रिक मोटर ऑर्डर करून किंवा खराब झालेल्या इलेक्ट्रिक मोटरला क्रेनवर कार्यरत असलेल्या बदलून, आपण प्रोटोटाइप इलेक्ट्रिक मोटरपेक्षा भिन्न E2nom सह अज्ञात उत्पादकाची इलेक्ट्रिक मोटर मिळवू शकता.
परिस्थिती काहीशी 90 च्या दशकाच्या सुरुवातीची आठवण करून देणारी आहे, जेव्हा एकाच नावाच्या अनेक पॉप गटांनी एकाच वेळी देशाचा दौरा केला.
आपण पुन्हा एकदा लक्षात ठेवूया की E2nom / I2nom हे प्रमाण जखमेच्या रोटरसह मोटरचे सर्वात महत्वाचे पॅरामीटर आहे, जे प्रारंभ होणारे प्रतिरोधक, रिले-संपर्क उपकरणे आणि वर नमूद केल्याप्रमाणे, स्वयं-उत्तेजनाच्या स्थितीवर प्रभावित करते. विद्युत मोटर.
तथापि, बहुतेकदा, क्लोन केलेल्या इंजिनच्या नेमप्लेट्सवर कोणताही रोटर डेटा नसतो. येथे एक उदाहरण आहे:
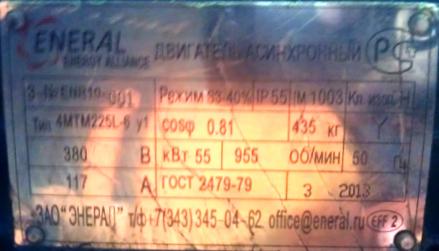
तांदूळ. 3. रोटर क्रेन असिंक्रोनस मोटर नेमप्लेट
तसे, या इलेक्ट्रिक मोटरचे "योग्य" मूल्य E2nom होते, फक्त आता ते प्रायोगिकरित्या निर्धारित केले जाणे आवश्यक होते.
4MTM225L6 इलेक्ट्रिक मोटरसाठी इतर उत्पादकांच्या कॅटलॉगमध्ये, E2nom = 340 V मूल्य सूचित केले आहे, म्हणजे. उत्तेजित मोटर एक उत्तेजित झाली. स्व-उत्तेजनासह डायनॅमिक ब्रेकिंगसह इलेक्ट्रिक ड्राइव्हचा भाग म्हणून अशा इलेक्ट्रिक मोटरचा वापर करण्याचा परिणाम म्हणजे रोटर आणि स्टेटर विंडिंग्जच्या यांत्रिक विनाशासह इलेक्ट्रिक मोटरचे भार कमी होणे आणि वेगळे करणे.
हेच चित्र लेखकाने अलीकडेच एका जुन्या रशियन मशीन-बिल्डिंग एंटरप्राइझमध्ये पाहिले आहे, जेथे E2n = 340 V सह 4MTM225L6 प्रकारची क्लोन इलेक्ट्रिक मोटर असलेली नवीन ब्रिज क्रेन वितरित केली गेली होती. केवळ नशिबाने, लोकांना असे झाले नाही. त्रास याव्यतिरिक्त, क्रेनचा मालक डॉजिंग केल्यानंतर इंजिन तीन (!) वेळा पुनर्संचयित करतो.
क्लोन इलेक्ट्रिक मोटर्सचा आणखी एक निर्माता, वरवर पाहता वारंवार समान अपघात अनुभवत आहे, आता एकाच ब्रँड (!) अंतर्गत दोन इलेक्ट्रिक मोटर्स तयार करतो. एक E2nom = 340 V सह, दुसरा E2nom = 264 V सह कॅटलॉगमध्ये नोटसह दिलेला आहे: "KB टॅप्स टाइप करण्यासाठी", म्हणजे. टॉवर क्रेन.
अशी मोटर खरोखरच टॉवर क्रेनवर मोठ्या प्रमाणावर वापरली जाते, परंतु ती ब्रिज क्रेनवर देखील स्थापित केली जाते. त्यामुळे तुम्ही पुरवठादार आणि ग्राहक यांच्यातील संवाद ऐकू शकता: “तुम्हाला कोणत्या क्रेनसाठी मोटरची गरज आहे? फ्लोअरिंग साठी. मग हे घ्या (E2nom = 340 V). » आणि इलेक्ट्रिक होइस्टच्या ड्राइव्हमध्ये स्वयं-उत्साही डायनॅमिक ब्रेकिंगसह एक नियंत्रण पॅनेल आहे. परिणाम वर वर्णन केले आहे.
त्याच वेळी, कोणीही म्हणत नाही की या इलेक्ट्रिक मोटर्स सदोष आहेत किंवा अविश्वसनीय आहेत आणि क्रेनवर वापरल्या जाऊ शकत नाहीत. बाजारात जितके अधिक पर्याय तितके चांगले. जसे ते म्हणतात, तेथे अधिक चांगले आणि भिन्न इंजिन आहेत. हे फक्त इतकेच आहे की त्यांचा ब्रँड ग्राहकांची दिशाभूल करतो, ज्याचे धोकादायक परिणाम होऊ शकतात.
प्रोटोटाइप व्यतिरिक्त रोटर पॅरामीटर्ससह इलेक्ट्रिक मोटर वापरण्यासाठी, आपण हे करणे आवश्यक आहे:
-
रोटर सर्किट उघडे असताना आणि स्टेटर विंडिंग ग्रिडशी जोडलेले असताना E2nom मोजा;
-
E2nom मोजमापांवर आधारित, बॅलास्ट प्रतिरोधकांची गणना करा, निवडा आणि ऑर्डर करा;
-
कॅटलॉगमधून नॉन-एक्सिटेशन इलेक्ट्रिक मोटर्ससाठी कंट्रोल पॅनल निवडा आणि ऑर्डर करा.
किंवा आपण त्याच्या किंमतीसह आकर्षित करणारे इंजिन ऑर्डर करण्यापूर्वी E2nom च्या मूल्याबद्दल विचारू शकता आणि विशेषतः करारामध्ये यावर सहमत आहात. तथापि, हे ऑर्डर केलेल्या मोटरच्या इनपुट नियंत्रणादरम्यान E2nom चे मोजमाप प्रतिबंधित करत नाही.
वरील सारांश, आपण खालील निष्कर्ष काढू शकतो:
-
फेज रोटर इलेक्ट्रिक मोटर्सवर आधारित घरगुती नळांच्या इलेक्ट्रिक ड्राइव्हमध्ये, स्वयं-उत्साही डायनॅमिक ब्रेकिंगचा मोठ्या प्रमाणावर वापर केला जातो. अशा हजारो इलेक्ट्रिक ड्राइव्ह कार्यरत आहेत. ते अद्याप जारी केले जात आहेत.
-
स्वयं-उत्तेजित डायनॅमिक ब्रेकिंग मोडमध्ये ऑपरेट करण्यासाठी, इलेक्ट्रिक मोटरमध्ये विशिष्ट E2nom / I2nom प्रमाण असणे आवश्यक आहे.
-
जखमेच्या रोटरसह इलेक्ट्रिक मोटरच्या स्वयं-उत्तेजनाची मुख्य अट म्हणजे E2nom ≤ 300 V चे मूल्य.
-
उत्तेजित इलेक्ट्रिक मोटर्ससाठी डिझाइन केलेल्या कंट्रोल पॅनेलसह E2nom> 300 V सह इलेक्ट्रिक मोटर्सचा वापर केल्याने लोड कमी होऊ शकतो आणि इलेक्ट्रिक मोटर नष्ट होऊ शकते.