इलेक्ट्रिक मोटर्सचे नियमन गुणधर्म
 भौतिक प्रक्रियेचे कोणतेही मूल्य (कोणतेही पॅरामीटर) नियंत्रित करणे म्हणजे दिलेल्या स्तरावर दिलेले मूल्य राखणे किंवा दिलेल्या कायद्यानुसार बदलणे.
भौतिक प्रक्रियेचे कोणतेही मूल्य (कोणतेही पॅरामीटर) नियंत्रित करणे म्हणजे दिलेल्या स्तरावर दिलेले मूल्य राखणे किंवा दिलेल्या कायद्यानुसार बदलणे.
वैयक्तिक अॅक्ट्युएटर किंवा उत्पादन यंत्रणांना सामान्य ऑपरेशनसाठी अॅक्ट्युएटर मोटर्सच्या वेगवेगळ्या फिरत्या गतीची आवश्यकता असते.
उदाहरणार्थ, पेपर मशीनचा प्रत्येक विभाग लोड बदलांची पर्वा न करता काटेकोरपणे स्थिर गतीने फिरला पाहिजे आणि ड्राइव्ह हा वेग राखण्यास सक्षम असणे आवश्यक आहे आणि प्रत्येक विभागाचा वेग स्वतंत्रपणे आणि संपूर्ण पेपर मशीनचा वेग सहजतेने बदलू शकतो.
इलेक्ट्रिक मोटर्सचा वेग वेगवेगळ्या प्रकारे नियंत्रित केला जातो. प्रोपल्शनसाठी ड्राइव्ह मोटरच्या योग्य निवडीसाठी हे जाणून घेणे आवश्यक आहे. वेगाच्या विशालतेवर शाफ्टवरील शक्ती आणि क्षणाच्या मूल्यांच्या अवलंबनात ड्राइव्ह भिन्न असतात.
गती बदलत असताना काही यंत्रणा सतत टॉर्क मूल्य राखतात. यामध्ये उदाहरणार्थ, मेटल कटिंग मशीन… या प्रकरणात, रोटेशनच्या गतीच्या प्रमाणात शक्ती बदलते (चित्रात्मकदृष्ट्या, ते आकृती 1 मध्ये सरळ रेषेने चित्रित केले आहे).
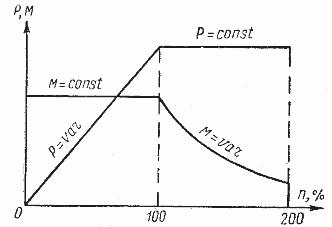
तांदूळ. 1. स्थिर शक्ती आणि सतत टॉर्कवर गती नियंत्रण वक्र
गती बदलते तेव्हा इतर यंत्रणांना स्थिर शक्ती P आवश्यक असते (उदा उचल आणि वाहतूक यंत्रणा). या प्रकरणात, हायपरबोला कायद्यानुसार क्षणाची विशालता बदलते.
तुम्ही P = Мω10-3kWh हे सूत्र वापरून आलेख तयार करू शकता,
कुठे: M हा शाफ्टचा क्षण आहे, N x m, ω = (2πn) / 60 — कोनीय वेग.
अंजीर मध्ये. 1 एकत्रित वक्र दाखवते जेथे गती शून्य ते रेटमध्ये बदलते, टॉर्क स्थिर राहतो. या प्रकरणात, शक्ती उत्पत्तीतून जाणार्या सरळ रेषेने वाढते. नंतर, वेगात आणखी वाढ झाल्यामुळे, शक्ती स्थिर राहते आणि हायपरबोलाच्या नियमानुसार क्षण कमी होतो.
हे देखील वाचा: इलेक्ट्रिक मोटर्स आणि उत्पादन यंत्रणेची यांत्रिक वैशिष्ट्ये