अनुक्रमिक उत्तेजना मोटर ब्रेकिंग मोड
 इलेक्ट्रिक ड्राइव्हमधील मालिका-उत्साहित डीसी इलेक्ट्रिक मोटर्स ड्रायव्हिंग आणि ब्रेकिंग दोन्ही मोडमध्ये कार्य करतात. समांतर उत्तेजित मोटरच्या विरूद्ध, मालिका उत्तेजित मोटर्ससाठी नेटवर्कवर ऊर्जा परत आणणारा जनरेटर मोड लागू होत नाही, कारण यांत्रिक वैशिष्ट्यांवरून (चित्र 1) पाहिल्याप्रमाणे या मोडमध्ये संक्रमण करण्यासाठी अस्वीकार्यपणे उच्च रोटेशनल गती आवश्यक असेल. मुख्य, अंमलात आणणे सर्वात सोपा, एक विरुद्ध ब्रेकिंग मोड आहे.
इलेक्ट्रिक ड्राइव्हमधील मालिका-उत्साहित डीसी इलेक्ट्रिक मोटर्स ड्रायव्हिंग आणि ब्रेकिंग दोन्ही मोडमध्ये कार्य करतात. समांतर उत्तेजित मोटरच्या विरूद्ध, मालिका उत्तेजित मोटर्ससाठी नेटवर्कवर ऊर्जा परत आणणारा जनरेटर मोड लागू होत नाही, कारण यांत्रिक वैशिष्ट्यांवरून (चित्र 1) पाहिल्याप्रमाणे या मोडमध्ये संक्रमण करण्यासाठी अस्वीकार्यपणे उच्च रोटेशनल गती आवश्यक असेल. मुख्य, अंमलात आणणे सर्वात सोपा, एक विरुद्ध ब्रेकिंग मोड आहे.
संभाव्य स्थिर क्षणांसह मशीन ड्राईव्हमध्ये (उदाहरणार्थ, लिफ्टिंग विंच), मोटर मोडमधून उलट दिशेने हस्तांतरण आर्मेचर सर्किट (पॉइंट ए) मध्ये अतिरिक्त प्रतिकार सादर करून केले जाते. मोटरचा टॉर्क कमी होतो आणि लोडद्वारे तयार केलेल्या स्थिर क्षणाच्या कृती अंतर्गत, मोटर त्याच्या क्षणाच्या क्रियेच्या विरुद्ध दिशेने फिरण्यास सुरवात करेल. भार कमी केला जाईल (बिंदू C).
रिअॅक्टिव्ह (संभाव्य ऊर्जा राखीव नसलेल्या) स्टॅटिक टॉर्कसह इलेक्ट्रिक मशीन ब्रेक करण्यासाठी, रिव्हर्सिंग (रिव्हर्स) वाइंडिंग स्विचिंग वापरले जाते. स्वतंत्रपणे उत्तेजित मोटरच्या या आणि इतर मोडमधील वैशिष्ट्यांच्या प्रतिनिधित्वाच्या संदर्भात वर जे काही सांगितले गेले आहे ते मालिका-उत्तेजित मोटरला तितकेच लागू होते.
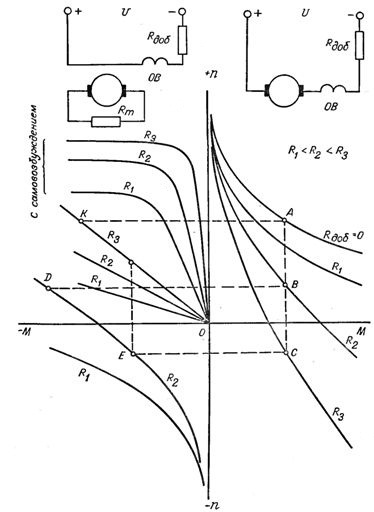
तांदूळ. 1. मालिका उत्तेजनासह डीसी मोटरचे कनेक्शन आकृती आणि यांत्रिक वैशिष्ट्ये
इलेक्ट्रोडायनामिक ब्रेकिंग मोड मालिका-उत्तेजना मोटर दोन प्रकारे लागू केली जाते: स्वयं-उत्तेजना आणि स्वयं-उत्तेजना. स्वतंत्र उत्तेजनासह, फील्ड विंडिंग लिमिटिंग रेझिस्टरद्वारे ग्रिडशी जोडलेले असते आणि ग्रिडमधून डिस्कनेक्ट केलेले आर्मेचर ब्रेकिंग रेझिस्टरशी जोडलेले असते. या प्रकरणात, चुंबकीय प्रवाह स्थिर असेल आणि मोटरचे ऑपरेटिंग मोड आणि यांत्रिक वैशिष्ट्ये समांतर उत्तेजना मोटरच्या समान इलेक्ट्रोडायनामिक ब्रेकिंगशी संबंधित असतील.
कधीकधी डायनॅमिक ब्रेकिंगमध्ये, स्वयं-उत्तेजनाचा वापर केला जातो, म्हणजेच, नेटवर्कपासून डिस्कनेक्ट केलेले आर्मेचर, ब्रेकिंग प्रतिरोधनापर्यंत बंद होते, मोटरला स्वयं-उत्साही जनरेटरच्या मोडमध्ये ऑपरेट करण्यास भाग पाडते. या प्रकरणात, आर्मेचर किंवा उत्तेजित विंडिंग्जचे टोक स्विच करणे आवश्यक आहे, नंतर जनरेटर मोड करंट अवशिष्ट चुंबकत्वाचा प्रवाह वाढवेल, अन्यथा आत्म-उत्तेजना होणार नाही.
कमी रिव्हसमध्ये, इंजिन देखील उत्तेजित होत नाही. एका विशिष्ट गती मूल्यासह प्रारंभ करून, स्वयं-उत्तेजनाची प्रक्रिया खूप लवकर पुढे जाते, ज्यामुळे ब्रेकिंग टॉर्कमध्ये तीव्र वाढ होते; परिणामी, ड्राइव्हच्या यांत्रिक भागाला धक्का बसला आहे.
अशा घटना सहसा अवांछित असतात, म्हणूनच आपत्कालीन थांबाच्या प्रसंगी आत्म-उत्तेजना वापरली जाते. सेल्फ-एक्सिटेशन मोडला नेटवर्कवरून कॉइलला पॉवर करण्याची आवश्यकता नाही.