इलेक्ट्रिक ड्राइव्हची यांत्रिक वैशिष्ट्ये
 इलेक्ट्रिक ड्राइव्हची निवड वर्क मशीनच्या आवश्यकतांनुसार निश्चित केली जाते. इलेक्ट्रिक ड्राइव्हने हे सुनिश्चित केले पाहिजे की कार्यरत मशीन सर्व संभाव्य मोडमध्ये निर्दिष्ट तंत्रज्ञानाचे कार्य करते: लोड सुरू करणे, प्राप्त करणे आणि डिस्चार्ज करणे, थांबणे, वेग बदलणे, स्थिर भार. या मोड्सचे स्वरूप प्रामुख्याने इंजिन आणि कार्यरत यंत्राच्या यांत्रिक गुणधर्मांद्वारे निर्धारित केले जाते... इंजिन आणि कार्यरत मशीन या दोन्हीच्या यांत्रिक गुणधर्मांचे मूल्यांकन करण्यासाठी मुख्य निकषांपैकी एक म्हणजे त्यांची यांत्रिक वैशिष्ट्ये.
इलेक्ट्रिक ड्राइव्हची निवड वर्क मशीनच्या आवश्यकतांनुसार निश्चित केली जाते. इलेक्ट्रिक ड्राइव्हने हे सुनिश्चित केले पाहिजे की कार्यरत मशीन सर्व संभाव्य मोडमध्ये निर्दिष्ट तंत्रज्ञानाचे कार्य करते: लोड सुरू करणे, प्राप्त करणे आणि डिस्चार्ज करणे, थांबणे, वेग बदलणे, स्थिर भार. या मोड्सचे स्वरूप प्रामुख्याने इंजिन आणि कार्यरत यंत्राच्या यांत्रिक गुणधर्मांद्वारे निर्धारित केले जाते... इंजिन आणि कार्यरत मशीन या दोन्हीच्या यांत्रिक गुणधर्मांचे मूल्यांकन करण्यासाठी मुख्य निकषांपैकी एक म्हणजे त्यांची यांत्रिक वैशिष्ट्ये.
इलेक्ट्रिक मोटर्सची यांत्रिक वैशिष्ट्ये
इलेक्ट्रिक मोटरचे यांत्रिक वैशिष्ट्य म्हणजे मोटर ω=φ(Md) किंवा n = e(Md) ने विकसित केलेल्या टॉर्कवर शाफ्टच्या रोटेशनच्या गतीचे अवलंबन आहे जेथे ω — शाफ्टच्या रोटेशनचा कोनीय वेग, रेड / सेकंद, n — शाफ्ट रोटेशनची गती, rpm
मोटरच्या यांत्रिक वैशिष्ट्यास नैसर्गिक अवलंबन म्हणतात n = f (M) पॉवर नेटवर्कच्या नाममात्र पॅरामीटर्ससह, सामान्य कनेक्शन योजना आणि इलेक्ट्रिकल सर्किटमध्ये अतिरिक्त प्रतिकारांशिवाय प्राप्त केले जाते.
जर अतिरिक्त प्रतिकार असतील किंवा मोटरला नाममात्र व्यतिरिक्त व्होल्टेज किंवा फ्रिक्वेन्सी असलेल्या नेटवर्कमधून दिले गेले असेल, तर मोटरच्या यांत्रिक वैशिष्ट्यांना कृत्रिम म्हटले जाईल... अर्थात, मोटारमध्ये असंख्य कृत्रिम वैशिष्ट्ये आहेत आणि फक्त एक नैसर्गिक.
बहुतेक इलेक्ट्रिक मोटर्स, लोड अंतर्गत, टॉर्क वाढल्याने वेग कमी होतो. या प्रकरणातील वैशिष्ट्याला घसरण असे म्हणतात... टॉर्कमधील बदलासह इंजिनच्या गतीतील बदलाचा अंदाज यांत्रिक वैशिष्ट्यांच्या तथाकथित कडकपणाद्वारे केला जातो, जो α = ΔM / Δω किंवा α = ΔM या गुणोत्तराने निर्धारित केला जातो. / Δн
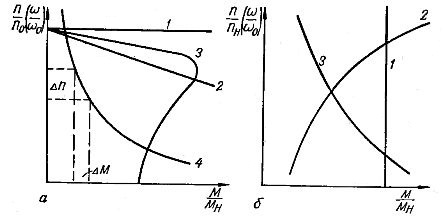
तांदूळ. 1. विविध प्रकारची यांत्रिक वैशिष्ट्ये: a — इलेक्ट्रिक मोटर्स, b — उत्पादन मशीन.
क्षणातील बदलाची मूल्ये आणि कडकपणाच्या निर्धारामध्ये घसरण्याचा दर सहसा सापेक्ष युनिट्समध्ये घेतला जातो. यामुळे विविध प्रकारच्या इंजिनांच्या वैशिष्ट्यांची तुलना करणे शक्य होते.
कडकपणाच्या डिग्रीवर अवलंबून, इंजिनची सर्व यांत्रिक वैशिष्ट्ये खालील गटांमध्ये विभागली आहेत.
1. कडकपणा मूल्य α = ∞… समकालिक मोटर्समध्ये अशी यांत्रिक वैशिष्ट्ये असतात (वक्र 1, अंजीर 1, a) कडकपणे स्थिर गतीसह.
2. वाढत्या टॉर्क आणि α = 40 — 10 सह वेगात तुलनेने कमी घट असलेली ठोस वैशिष्ट्ये.या गटामध्ये स्वतंत्र उत्तेजना (वक्र 2) सह डीसी मोटर्सची नैसर्गिक वैशिष्ट्ये आणि रेखीय विभागात (वक्र 3) इंडक्शन मोटर्सची वैशिष्ट्ये समाविष्ट आहेत.
3. वाढत्या टॉर्कसह वेगात मोठ्या सापेक्ष घट आणि α = 10 पर्यंत कडकपणासह मऊ यांत्रिक वैशिष्ट्ये. अशा वैशिष्ट्यांमध्ये मालिका उत्तेजित (वक्र 4) सह डीसी मोटर्स आहेत, उच्च आर्मेचर प्रतिरोधासह स्वतंत्रपणे उत्तेजित मोटर्स आणि अतिरिक्त प्रतिकारांसह असिंक्रोनस मोटर्स आहेत. रोटर सर्किट मध्ये.
इलेक्ट्रिक ड्राइव्हच्या ऑपरेशन दरम्यान, कार्यरत मशीनच्या प्रतिकारांवर मात करण्यासाठी, मोटरने विशिष्ट क्षण विकसित करणे आवश्यक आहे. म्हणून, इंजिन निवडताना, प्रथम इंजिन आणि कार्यरत मशीनच्या वैशिष्ट्यांचा पत्रव्यवहार ओळखणे आवश्यक आहे.

कार्यरत मशीनची यांत्रिक वैशिष्ट्ये
कार्यरत मशीनचे यांत्रिक वैशिष्ट्य म्हणजे ड्राइव्ह शाफ्टच्या रोटेशनच्या गतीवर मशीनच्या स्थिर प्रतिकाराच्या क्षणाचे अवलंबन. संयुक्त बांधकामाच्या सोयीसाठी, हे अवलंबित्व सामान्यतः मोटर वैशिष्ट्याप्रमाणेच ω=φ(Ms -Ms) किंवा n =e(Miss) या स्वरूपात व्यक्त केले जाते.
स्टॅटिक रेझिस्टन्सचा क्षण Ms, किंवा थोडक्यात स्टॅटिक मोमेंट, जेव्हा गती बदलत नाही तेव्हा स्थिर (स्थिर) मोडमध्ये ड्राईव्ह शाफ्टवर मशीनद्वारे तयार केलेला प्रतिकाराचा क्षण असतो.
किनेमॅटिक स्कीमच्या घटकांवरील स्थिर शक्तींचे किंवा क्षणांचे वितरण ज्ञात असल्यास यंत्राची यांत्रिक वैशिष्ट्ये प्रायोगिकरित्या किंवा गणनाद्वारे प्राप्त केली जाऊ शकतात.मशीनचे स्थिर क्षण केवळ वेगावरच नव्हे तर इतर प्रमाणांवर देखील अवलंबून असू शकतात, म्हणून, इलेक्ट्रिक ड्राइव्हच्या व्यावहारिक गणनेमध्ये, प्रत्येक केसचा स्वतंत्रपणे विचार करणे आवश्यक आहे.
विविध कार्यरत मशीनचे स्थिर क्षण त्यांच्या वेग अवलंबनाच्या स्वरूपानुसार (यांत्रिक वैशिष्ट्ये) गटांमध्ये विभागले जातात. सराव मध्ये सर्वात सामान्य खालील आहेत.
1. स्थिर क्षण थोडा अवलंबून असतो किंवा व्यावहारिकदृष्ट्या वेगावर अवलंबून नसतो (वक्र 1, अंजीर 2, ब). अशा वैशिष्ट्यांमध्ये लिफ्टिंग यंत्रणा, क्रेन, विंच, होइस्ट तसेच बेल्ट कन्व्हेयर्स सतत लोड असतात.
2. यंत्राचा स्थिर क्षण वेगाच्या वर्गाच्या प्रमाणात (वक्र 2) वाढतो. हे वैशिष्ट्य, अक्षीय पंख्यांचे वैशिष्ट्य, पंखाचे वैशिष्ट्य असे म्हटले जाते आणि विश्लेषणात्मकपणे सूत्राच्या स्वरूपात सादर केले जाते: Mc = Mo + kn2, जेथे Mo हा प्रारंभिक स्थिर क्षण आहे, बहुतेकदा घर्षण शक्तींमुळे, जे सहसा घडत नाहीत. गतीवर अवलंबून आहे, k हा प्रायोगिक गुणांक आहे. पंख्यांव्यतिरिक्त, सेंट्रीफ्यूगल आणि व्होर्टेक्स पंप, सेपरेटर, सेंट्रीफ्यूज, प्रोपेलर, टर्बोचार्जर्स आणि फिरणारे ड्रम इडलरमध्ये पंख्याची वैशिष्ट्ये आहेत.
3. वाढत्या गतीने (वक्र 3) स्थिर क्षण कमी होतो. या गटामध्ये काही कन्व्हेयर यंत्रणा आणि काही मेटल कटिंग मशीनची वैशिष्ट्ये समाविष्ट आहेत.
4. तांत्रिक प्रक्रियेच्या वैशिष्ठ्यांमुळे तीव्र संक्रमणासह, स्थिर क्षण अस्पष्टपणे गतीसह बदलतो. या गटाच्या वैशिष्ट्यांमध्ये अशी मशीन्स आहेत जी वारंवार मोठ्या ओव्हरलोडसह कार्य करतात, ज्यामुळे काहीवेळा पूर्ण थांबते.उदाहरणार्थ, सिंगल-बकेट एक्साव्हेटर, स्क्रॅपर कन्व्हेयरसाठी स्कूपिंग यंत्रणा, वाहतूक केलेल्या वस्तुमानाच्या ब्लॉकिंग अंतर्गत काम करणे, क्रशर आणि इतर मशीन.
सूचीबद्ध केलेल्या व्यतिरिक्त, सराव मध्ये मशीनची इतर प्रकारची यांत्रिक वैशिष्ट्ये आहेत, उदाहरणार्थ, पिस्टन पंप आणि कंप्रेसर, ज्यांचे स्थिर क्षण मार्गावर अवलंबून असतात.