ऑपरेशनचे सिद्धांत आणि इलेक्ट्रिक मोटरचे डिव्हाइस
कोणतीही इलेक्ट्रिक मोटर त्यावर लागू केलेल्या विजेच्या वापरामुळे यांत्रिक कार्य करण्यासाठी डिझाइन केलेली असते, जी सामान्यतः रोटरी मोशनमध्ये रूपांतरित होते. जरी तंत्रज्ञानामध्ये असे मॉडेल आहेत जे ताबडतोब कार्यरत शरीराची भाषांतरात्मक हालचाल तयार करतात. त्यांना रेखीय मोटर्स म्हणतात.
औद्योगिक प्रतिष्ठानांमध्ये, इलेक्ट्रिक मोटर्स तांत्रिक उत्पादन प्रक्रियेत गुंतलेली विविध मेटल-कटिंग मशीन आणि यांत्रिक उपकरणे चालवतात.
घरगुती उपकरणांच्या आत, इलेक्ट्रिक मोटर्स वॉशिंग मशीन, व्हॅक्यूम क्लीनर, संगणक, केस ड्रायर, मुलांची खेळणी, घड्याळे आणि इतर अनेक उपकरणे चालवतात.

मूलभूत शारीरिक प्रक्रिया आणि कृतीचे तत्त्व
आत हलवत असताना चुंबकीय क्षेत्र इलेक्ट्रिक चार्जेस, ज्याला विद्युत प्रवाह म्हणतात, नेहमी एक यांत्रिक शक्ती असते जी चुंबकीय क्षेत्र रेषांच्या अभिमुखतेच्या लंब असलेल्या विमानात त्यांची दिशा विचलित करते.जेव्हा विद्युत प्रवाह धातूच्या तारेतून किंवा तिच्यापासून बनवलेल्या कॉइलमधून जातो, तेव्हा ही शक्ती प्रत्येक विद्युत्-वाहक तार आणि संपूर्ण कॉइलला हलवते/फिरवते.
खालील फोटो मेटल फ्रेम दर्शविते ज्यामध्ये विद्युत प्रवाह आहे. त्यावर लागू केलेले चुंबकीय क्षेत्र फ्रेमच्या प्रत्येक शाखेसाठी एक बल F तयार करते, ज्यामुळे एक घूर्णन गती निर्माण होते.

विद्युत आणि चुंबकीय उर्जेच्या परस्परसंवादाची ही मालमत्ता, बंद कंडक्टिंग लूपमध्ये इलेक्ट्रोमोटिव्ह फोर्सच्या निर्मितीवर आधारित, प्रत्येक इलेक्ट्रिक मोटरवर कार्यान्वित केली जाते. त्याच्या डिझाइनमध्ये हे समाविष्ट आहे:
-
एक कॉइल ज्याद्वारे विद्युत प्रवाह वाहतो. हे एका विशेष अँकर कोरवर ठेवलेले आहे आणि घर्षण शक्तींचा प्रतिकार कमी करण्यासाठी रोटरी बीयरिंगमध्ये निश्चित केले आहे. या डिझाइनला रोटर म्हणतात;
-
स्टेटर, जे चुंबकीय क्षेत्र तयार करते, जे त्याच्या शक्तीच्या रेषांसह रोटर विंडिंगच्या वळणांवरून जाणारे विद्युत शुल्क आत प्रवेश करते;
-
स्टेटर ठेवण्यासाठी गृहनिर्माण. शरीराच्या आत, विशेष जागा बनविल्या जातात, ज्याच्या आत रोटर बीयरिंगचे बाह्य पिंजरे बसवले जातात.
सर्वात सोप्या इलेक्ट्रिक मोटरचे सरलीकृत डिझाइन खालील फॉर्मच्या चित्राद्वारे दर्शविले जाऊ शकते.

जेव्हा रोटर फिरतो तेव्हा टॉर्क तयार होतो, ज्याची शक्ती डिव्हाइसच्या सामान्य डिझाइनवर, लागू केलेल्या विद्युत उर्जेचे प्रमाण आणि रूपांतरणादरम्यान होणारे नुकसान यावर अवलंबून असते.
मोटरच्या जास्तीत जास्त संभाव्य टॉर्क पॉवरची परिमाण नेहमी त्यावर लागू केलेल्या विद्युत उर्जेपेक्षा कमी असते. हे कार्यक्षमतेच्या मूल्याद्वारे दर्शविले जाते.
इलेक्ट्रिक मोटर्सचे प्रकार
कॉइल्समधून वाहणाऱ्या विद्युतप्रवाहाच्या प्रकारानुसार त्यांची डीसी किंवा एसी मोटर्समध्ये विभागणी केली जाते.या दोन गटांपैकी प्रत्येकामध्ये वेगवेगळ्या तांत्रिक प्रक्रियांचा वापर करून मोठ्या प्रमाणात बदल केले जातात.
डीसी मोटर्स
त्यांच्याकडे स्थिर स्थिर द्वारे तयार केलेले स्टेटर चुंबकीय क्षेत्र आहे कायम चुंबक किंवा उत्तेजना कॉइलसह विशेष इलेक्ट्रोमॅग्नेट्स. आर्मेचर कॉइल शाफ्टमध्ये घट्टपणे बसवलेले असते, जे बीयरिंगमध्ये निश्चित केले जाते आणि त्याच्या स्वतःच्या अक्षाभोवती मुक्तपणे फिरू शकते.
अशा इंजिनची मूलभूत रचना आकृतीमध्ये दर्शविली आहे.

फेरोमॅग्नेटिक पदार्थांपासून बनवलेल्या आर्मेचरच्या गाभ्यावर, दोन मालिका-कनेक्ट केलेले भाग असलेली एक कॉइल असते, जी एका टोकाला कंडक्टिंग कलेक्टर प्लेट्सशी जोडलेली असते आणि एकमेकांशी जोडलेली असते. दोन ग्रेफाइट ब्रश आर्मेचरच्या विरुद्ध टोकांवर स्थित असतात आणि कलेक्टर प्लेट्सच्या संपर्क पॅडवर दाबले जातात.
खालच्या पॅटर्नच्या ब्रशवर सकारात्मक DC स्रोत क्षमता आणि वरच्या बाजूस नकारात्मक क्षमता लागू केली जाते. कॉइलमधून वाहणाऱ्या विद्युतप्रवाहाची दिशा एका लाल बाणाने दाखवली जाते.
विद्युतप्रवाहामुळे चुंबकीय क्षेत्राला आर्मेचरच्या खालच्या डाव्या बाजूला उत्तर ध्रुव आणि आर्मेचरच्या वरच्या उजव्या बाजूला दक्षिण ध्रुव असतो (जिम्बल नियम). याचा परिणाम त्याच नावाच्या स्थिर ध्रुवांवरून रोटरच्या ध्रुवांना मागे टाकण्यात आणि स्टेटरच्या विरुद्ध ध्रुवांकडे आकर्षित होण्यात होतो. लागू केलेल्या शक्तीच्या परिणामी, एक रोटेशनल हालचाल होते, ज्याची दिशा तपकिरी बाणाने दर्शविली जाते.
जडत्वाद्वारे आर्मेचरच्या पुढील रोटेशनसह, ध्रुव इतर कलेक्टर प्लेट्समध्ये हस्तांतरित केले जातात. त्यांच्यातील विद्युत् प्रवाहाची दिशा उलट आहे. रोटर पुढे फिरत राहतो.
अशा कलेक्टर उपकरणाच्या साध्या डिझाइनमुळे विद्युत उर्जेचे मोठे नुकसान होते.अशा मोटर्स साध्या डिझाइनच्या उपकरणांमध्ये किंवा मुलांसाठी खेळण्यांमध्ये काम करतात.
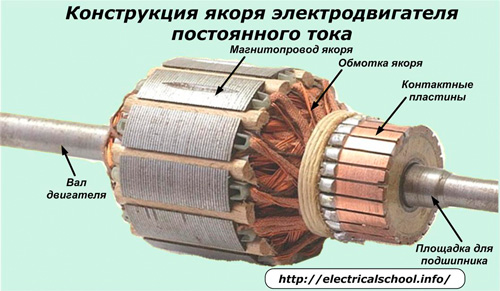
उत्पादन प्रक्रियेत सामील असलेल्या थेट वर्तमान इलेक्ट्रिक मोटर्सची रचना अधिक जटिल आहे:
-
कॉइल दोन भागात नाही तर अनेक भागांमध्ये विभागली गेली आहे;
-
कॉइलचा प्रत्येक विभाग स्वतःच्या खांबावर बसविला जातो;
-
कलेक्टर डिव्हाइस विंडिंगच्या संख्येनुसार विशिष्ट संख्येच्या संपर्क पॅडसह बनविले जाते.
परिणामी, प्रत्येक ध्रुवाचे त्याच्या संपर्क प्लेट्सद्वारे ब्रशेस आणि वर्तमान स्त्रोताशी एक गुळगुळीत कनेक्शन तयार होते आणि उर्जेचे नुकसान कमी होते.
अशा अँकरचे डिव्हाइस फोटोमध्ये दर्शविले आहे.
डीसी मोटर्समध्ये, रोटरच्या रोटेशनची दिशा उलट केली जाऊ शकते. हे करण्यासाठी, स्त्रोतावरील ध्रुवीयता बदलून कॉइलमधील विद्युत् प्रवाहाची हालचाल विरुद्ध बदलणे पुरेसे आहे.
एसी मोटर्स
ते मागील डिझाईन्सपेक्षा वेगळे आहेत की त्यांच्या कॉइलमध्ये वाहणारे विद्युत प्रवाह द्वारे वर्णन केले आहे साइनसॉइडल हार्मोनिक कायदावेळोवेळी त्याची दिशा बदलणे (चिन्ह). त्यांना उर्जा देण्यासाठी, पर्यायी चिन्हांसह जनरेटरमधून व्होल्टेज पुरवले जाते.
अशा मोटर्सचे स्टेटर चुंबकीय सर्किटद्वारे केले जाते. हे खोबणीसह फेरोमॅग्नेटिक प्लेट्सचे बनलेले आहे ज्यामध्ये कॉइलची वळणे फ्रेम (कॉइल) कॉन्फिगरेशनसह ठेवली जातात.

सिंक्रोनस इलेक्ट्रिक मोटर्स
खालील फोटो रोटर आणि स्टेटरच्या इलेक्ट्रोमॅग्नेटिक फील्डच्या सिंक्रोनस रोटेशनसह सिंगल-फेज एसी मोटरच्या ऑपरेशनचे सिद्धांत दर्शविते.

स्टॅटरच्या चुंबकीय सर्किटच्या खोबणीमध्ये डायमेट्रिकली विरुद्ध टोकांना, वळणाच्या तारा ठेवल्या जातात, योजनाबद्धपणे फ्रेमच्या रूपात दर्शविल्या जातात ज्यामधून पर्यायी प्रवाह वाहतो.
त्याच्या अर्ध-लहरीच्या सकारात्मक भागाच्या उत्तीर्णतेशी संबंधित क्षणाच्या बाबतीत आपण विचार करूया.
बेअरिंग सेलमध्ये, अंगभूत स्थायी चुंबक असलेला रोटर मुक्तपणे फिरतो, ज्यामध्ये ध्रुवाचे उत्तरेकडील «N तोंड» आणि दक्षिणेकडील «S तोंड» स्पष्टपणे परिभाषित केले जातात. जेव्हा स्टेटर विंडिंगमधून विद्युत् प्रवाहाची सकारात्मक अर्ध-लहर वाहते तेव्हा त्यामध्ये ध्रुव «S st» आणि «N st» असलेले चुंबकीय क्षेत्र तयार होते.
रोटर आणि स्टेटरच्या चुंबकीय क्षेत्रांमध्ये (ध्रुव मागे टाकणारे आणि ध्रुव आकर्षित करण्याच्या विपरीत) परस्पर क्रिया बल उद्भवतात जे विरुद्ध ध्रुव एकमेकांच्या शक्य तितक्या जवळ असतात तेव्हा मोटर आर्मेचर कोणत्याही स्थितीतून टोकाकडे वळवतात. दुसरा
जर आपण त्याच प्रकरणाचा विचार केला तर, परंतु त्या क्षणी जेव्हा विरुद्ध - प्रवाहाची नकारात्मक अर्ध-लहर फ्रेम वायरमधून जाते, तर आर्मेचरचे रोटेशन उलट दिशेने होईल.
स्टेटरमध्ये रोटरची सतत हालचाल सुनिश्चित करण्यासाठी, एक विंडिंग फ्रेम बनविली जात नाही, परंतु त्यापैकी प्रत्येक स्वतंत्र वर्तमान स्त्रोताद्वारे समर्थित आहे हे लक्षात घेऊन त्यांची एक विशिष्ट संख्या बनविली जाते.
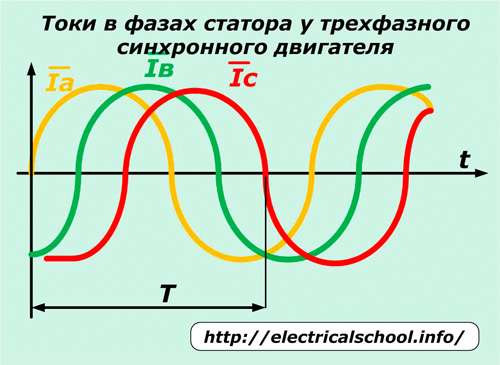
सिंक्रोनस रोटेशनसह तीन-फेज एसी मोटरचे कार्य तत्त्व, रोटर आणि स्टेटरचे इलेक्ट्रोमॅग्नेटिक फील्ड खालील चित्रात दर्शविले आहेत.

या डिझाइनमध्ये, स्टेटर मॅग्नेटिक सर्किटच्या आत तीन कॉइल A, B आणि C बसवले जातात, एकमेकांना 120 अंशांच्या कोनांनी ऑफसेट केले जातात. कॉइल A ला पिवळा, B हिरवा आणि C लाल आहे. प्रत्येक कॉइल मागील केस प्रमाणेच फ्रेम्ससह बनविली जाते.
चित्रात, कोणत्याही परिस्थितीत, प्रवाह फक्त एका कॉइलमधून पुढे किंवा उलट दिशेने वाहतो, जो «+» आणि «-« चिन्हांद्वारे दर्शविला जातो.
जेव्हा पॉझिटिव्ह हाफ-वेव्ह फेज A मधून पुढे दिशेने जाते, तेव्हा रोटर फील्डचा अक्ष क्षैतिज स्थिती घेतो, कारण स्टेटरचे चुंबकीय ध्रुव या विमानात तयार होतात आणि जंगम आर्मेचरला आकर्षित करतात. रोटरचे विरुद्ध ध्रुव स्टेटरच्या ध्रुवांजवळ जातात.
पॉझिटिव्ह हाफ वेव्ह सी फेजमध्ये गेल्यावर आर्मेचर ६० अंश घड्याळाच्या दिशेने फिरेल. फेज B वर करंट लागू झाल्यावर, एक समान आर्मेचर रोटेशन होईल. पुढील वळणाच्या पुढील टप्प्यातील प्रत्येक त्यानंतरचा विद्युत प्रवाह रोटरला वळवेल.
जर 120 अंशांच्या कोनात तीन-टप्प्याचा मुख्य व्होल्टेज प्रत्येक वळणावर लागू केला असेल, तर त्यांच्यामध्ये पर्यायी प्रवाह फिरतील, ज्यामुळे आर्मेचर फिरेल आणि लागू केलेल्या इलेक्ट्रोमॅग्नेटिक फील्डसह त्याचे समकालिक रोटेशन तयार होईल.
थ्री-फेज स्टेपर मोटरमध्ये हेच यांत्रिक डिझाइन यशस्वीरित्या वापरले जाते… फक्त प्रत्येक वळणावर नियंत्रणाद्वारे विशेष नियंत्रक (स्टेपर मोटर चालक) वर वर्णन केलेल्या अल्गोरिदमनुसार स्थिर डाळी लागू आणि काढल्या जातात.
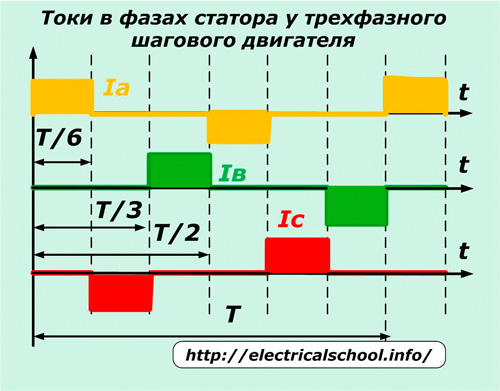
त्यांचे स्टार्ट-अप एक रोटेशनल हालचाल सुरू करते आणि ठराविक वेळी त्यांची समाप्ती शाफ्टचे मोजलेले रोटेशन प्रदान करते आणि विशिष्ट तांत्रिक ऑपरेशन्स करण्यासाठी प्रोग्राम केलेल्या कोनात थांबते.
वर्णन केलेल्या दोन्ही तीन-चरण प्रणालींमध्ये, आर्मेचरच्या रोटेशनची दिशा बदलणे शक्य आहे. हे करण्यासाठी, तुम्हाला फक्त टप्प्यांचा क्रम बदलण्याची आवश्यकता आहे «A» — «B» — «C» दुसऱ्यामध्ये, उदाहरणार्थ «A» — «C» — «B».
रोटरचा वेग T कालावधीच्या लांबीद्वारे नियंत्रित केला जातो. त्याची घट झाल्यामुळे रोटेशनचा वेग वाढतो.टप्प्यातील विद्युत् प्रवाहाच्या मोठेपणाचे परिमाण विंडिंगच्या अंतर्गत प्रतिकारावर आणि त्यावर लागू केलेल्या व्होल्टेजच्या मूल्यावर अवलंबून असते. हे इलेक्ट्रिक मोटरच्या टॉर्कचे प्रमाण आणि शक्ती निर्धारित करते.
असिंक्रोनस मोटर्स
या मोटर डिझाईन्समध्ये पूर्वी चर्चा केलेल्या सिंगल-फेज आणि थ्री-फेज मॉडेल्सप्रमाणेच विंडिंगसह समान स्टेटर चुंबकीय सर्किट आहे. त्यांना त्यांचे नाव आर्मेचर आणि स्टेटर इलेक्ट्रोमॅग्नेटिक फील्डच्या असिंक्रोनस रोटेशनवरून मिळाले. हे रोटरचे कॉन्फिगरेशन सुधारून केले जाते.
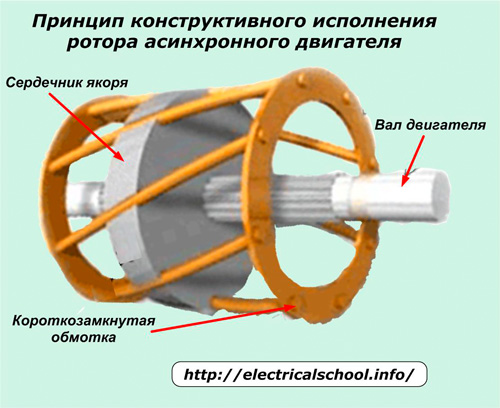
त्याचा गाभा ग्रूव्ड इलेक्ट्रिकल स्टील प्लेट्सचा बनलेला आहे. ते अॅल्युमिनियम किंवा तांबे वर्तमान कंडक्टरसह सुसज्ज आहेत, जे प्रवाहकीय रिंगांसह आर्मेचरच्या शेवटी बंद आहेत.
जेव्हा स्टेटर विंडिंग्सवर व्होल्टेज लागू केले जाते, तेव्हा रोटर विंडिंगमध्ये इलेक्ट्रोमोटिव्ह फोर्सद्वारे विद्युत प्रवाह प्रेरित केला जातो आणि आर्मेचर चुंबकीय क्षेत्र तयार होते. जेव्हा हे इलेक्ट्रोमॅग्नेटिक फील्ड परस्परसंवाद करतात, तेव्हा मोटर शाफ्ट फिरू लागते.
या डिझाइनसह, रोटरची हालचाल स्टेटरमध्ये फिरत असलेल्या इलेक्ट्रोमॅग्नेटिक फील्डच्या घटनेनंतरच शक्य आहे आणि ते त्याच्यासह ऑपरेशनच्या असिंक्रोनस मोडमध्ये चालू राहते.
एसिंक्रोनस मोटर्स डिझाइनमध्ये सोपे आहेत. त्यामुळे, ते स्वस्त आहेत आणि औद्योगिक प्रतिष्ठापनांमध्ये आणि घरगुती उपकरणांमध्ये मोठ्या प्रमाणावर वापरले जातात.

ABB स्फोट-प्रूफ इलेक्ट्रिक मोटर
रेखीय मोटर्स
औद्योगिक यंत्रणेच्या अनेक कार्यरत संस्था एकाच विमानात परस्पर किंवा भाषांतरित हालचाली करतात, जे मेटलवर्किंग मशीन्स, वाहने, ढीग चालविताना हातोड्याचे वार यांच्या ऑपरेशनसाठी आवश्यक असते ...
रोटरी इलेक्ट्रिक मोटरमधून गिअरबॉक्सेस, बॉल स्क्रू, बेल्ट ड्राईव्ह आणि तत्सम यांत्रिक उपकरणांद्वारे अशा कार्यरत शरीरास हलविण्यामुळे डिझाइन गुंतागुंतीचे होते. या समस्येचे आधुनिक तांत्रिक उपाय म्हणजे रेखीय इलेक्ट्रिक मोटरचे ऑपरेशन.
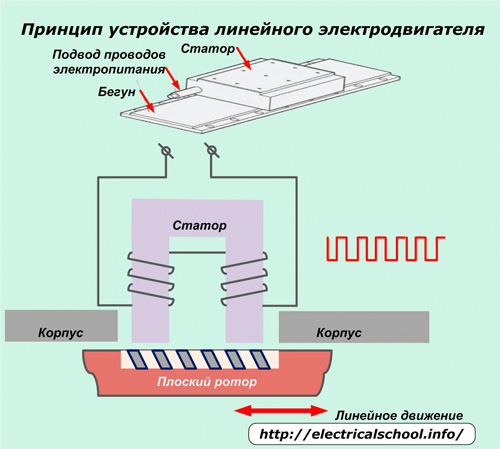
त्याचे स्टेटर आणि रोटर रोटरी इलेक्ट्रिक मोटर्सप्रमाणेच रिंगांमध्ये जखमेच्या ऐवजी पट्ट्यांच्या स्वरूपात वाढवलेले असतात.
एका विशिष्ट लांबीच्या खुल्या चुंबकीय सर्किटसह स्थिर स्टेटरमधून इलेक्ट्रोमॅग्नेटिक उर्जेच्या हस्तांतरणामुळे रनर रोटरला परस्पर रेखीय गती प्रदान करणे हे ऑपरेशनचे सिद्धांत आहे. क्रमाक्रमाने विद्युत् प्रवाह चालू करून त्याच्या आत कार्यरत चुंबकीय क्षेत्र तयार केले जाते.
हे कलेक्टरसह आर्मेचर विंडिंगवर कार्य करते. अशा मोटरमध्ये निर्माण होणारी शक्ती रोटरला मार्गदर्शक घटकांसह फक्त एका रेषीय दिशेने हलवते.
रेखीय मोटर्स डायरेक्ट करंट किंवा अल्टरनेटिंग करंटवर ऑपरेट करण्यासाठी डिझाइन केलेले आहेत आणि सिंक्रोनस किंवा एसिंक्रोनस मोडमध्ये ऑपरेट करू शकतात.
रेखीय मोटर्सचे तोटे आहेत:
-
तंत्रज्ञानाची जटिलता;
-
उच्च किंमत;
-
कमी ऊर्जा कार्यक्षमता.